Hello,
I’ve entered some strange issues with my copter with flying in offboard mode. Sometimes it flies away not taking into account velocity setpoints from my program. During log analysis I found that local position is calculated wrongly, the data from my accurate gps(its rtk) is somehow ignored. What can cause it? And could you advice me a proper way to analyze EKF working process? I found parameters EST*, but I couldnt find their descriptions.
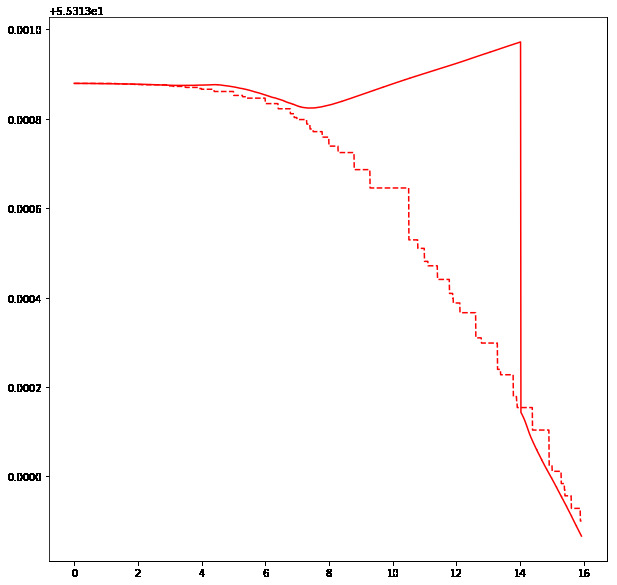
Here is image with GPOS_Lat vs TIME_StartTime (red continues line) and GPS_Lat vs TIME_StartTime (dashed line)
Thank you in advance,
Firefly