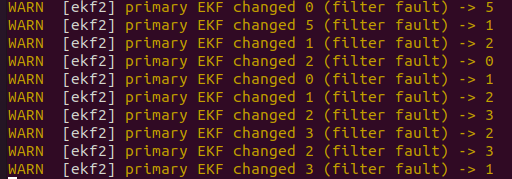
I am currently trying to develope a new .world where gravity has a value similar to the one of Mars surface, around 3,1 m/s². However, once I run the drone into that world, it can’t even takeoff due to the following printed errors:
I have tested several g values, and it seems it does not allow any g value different from 9.81 m/s². Does someone know why is this happening? And how could it be solved?
Hello @jfd . I have been doing some research since last response. I am developing by the moment in SITL, so where should I change the value of the gravity acceleration if i want a value different from 9.806. In accelerometer_calibration.cpp?