Hi, all
During flight, I found some problem about heading information.
below like figure, a drone (blue) is working well, however a drone (red) turns around around when arriving destination.

I think that it is problem about heading information.
I use attitude_estimator_q and using ver 1.2.0
Thanks in advance
STMOON
p.s.
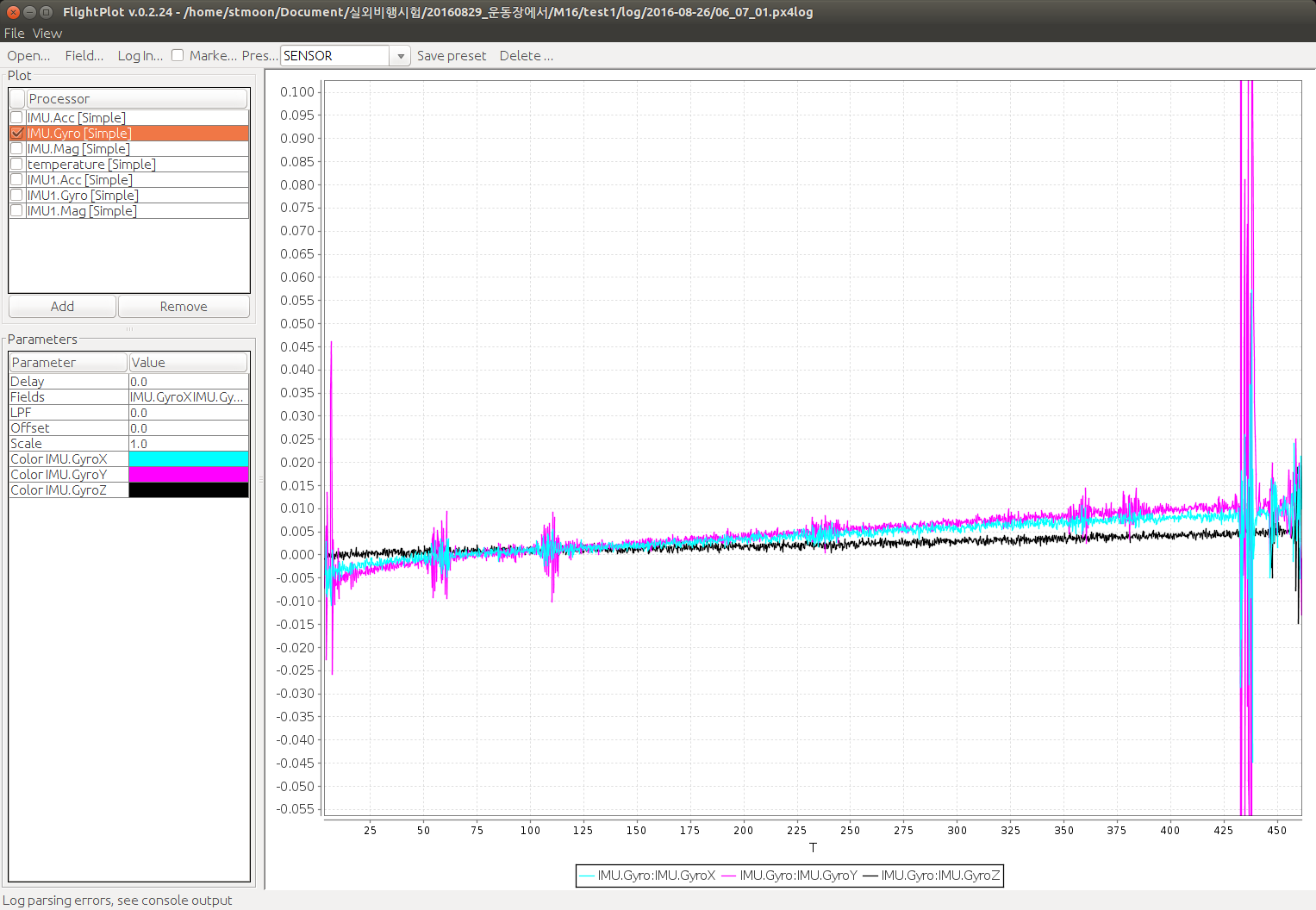
I attach mag and gyro information when not working.
-
mag
-
gyro