Hi
I use a PX4 1.9.0 with external vision system.
For external vision, I use artificial marker, range sensor, 2D LiDar, so pixhawk local position follows just immediately.
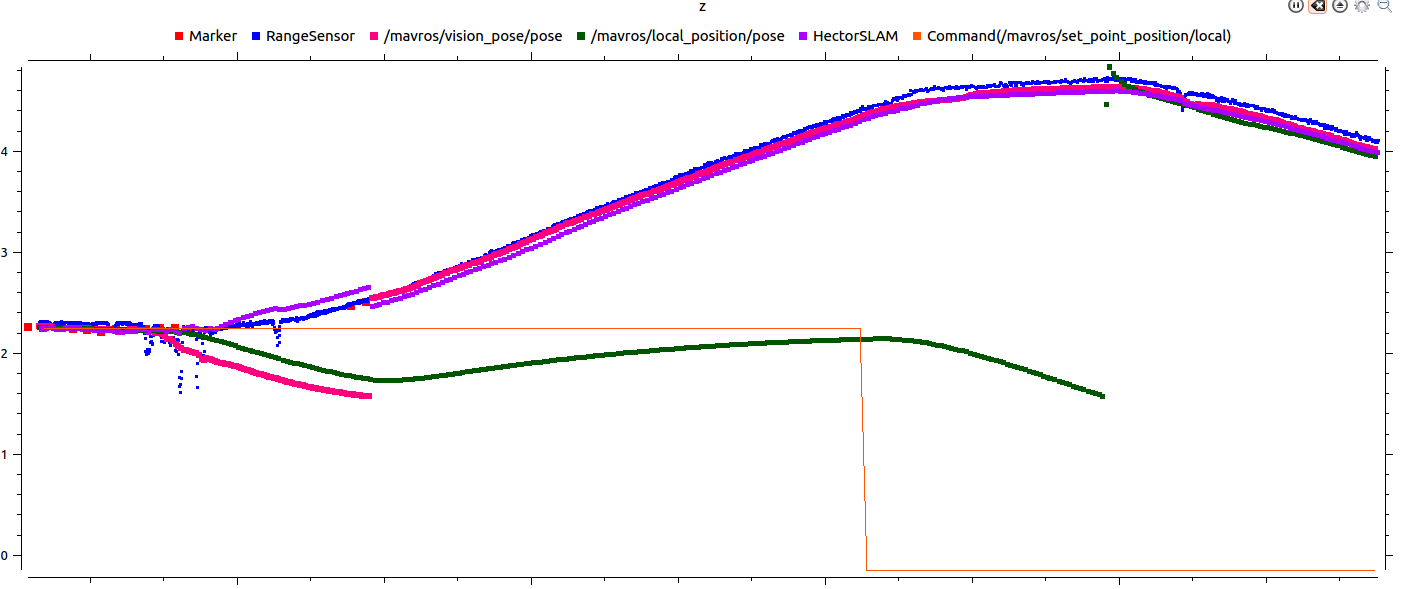
But, sometimes pixhawk does not follows well like below piture, and pixhawk jumped up MSF data suddenly.
How to I adjust or fix about this?
I also upload my flight review data to get your help
https://review.px4.io/plot_app?log=6e951a91-732c-4c1d-ae5c-eaf4c9d6d669
Thank you