Hey Everyone,
New to the forum, and learning to look over my logs. I have a 400 that I built on top of the Pixfalcon board over the last year and I have been having trouble tracking down the issues based on trial and error.
Finally learning to use the logs and I’m starting to recognize what I’m looking at. I have attached the log of my most recent (relatively) successful flight and would like someone with a better eye to point out some of the things that stand out to them.
From what I have gathered, my PID’s need adjusting. It seems like the controller is doing well responding to larger displacements, but it is not keeping up with the lesser vibrations. I am unsure also if overall vibration is excessive leading to additional instability? Any comment on that would be swell.
I have tried adjusting PID’s before, but this is an arduous process that I feel like I’ve been going into blind. Is there any example of information in my logs that you can point to that might help narrow down the proper adjustments?
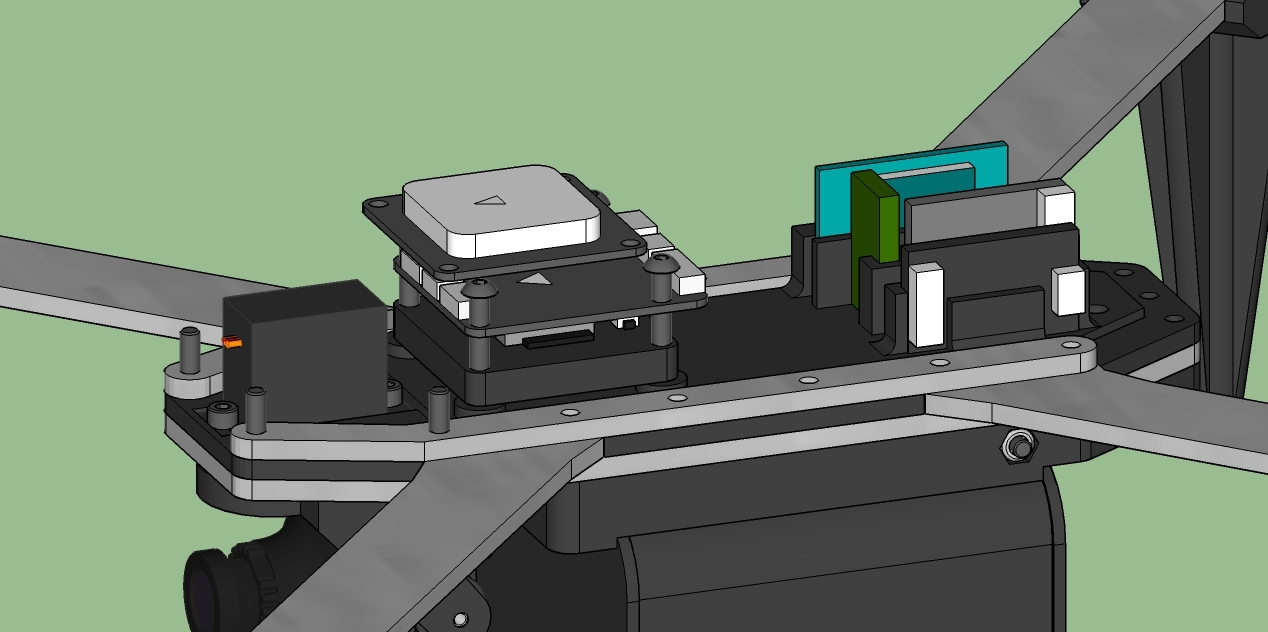
I have also noticed that the magnetic fields seem pretty high, and am working on relocating my external GPS and adding some shielding between power distribution and the GPS. I am hoping this will take care of the “toilet bowling” issue that shows up in position hold and loiter modes, as well as the periodic mag and GPS failures.
I realize this is a lot of basic information covered in the wiki, however I have spent months pouring over that and finding myself with a lot of ideas but no real direction as to narrowing down the underlying issues with this build.
Thanks!
- John
https://logs.px4.io/plot_app?log=e7549450-9ba0-4ea8-8d79-acfa533d66d3