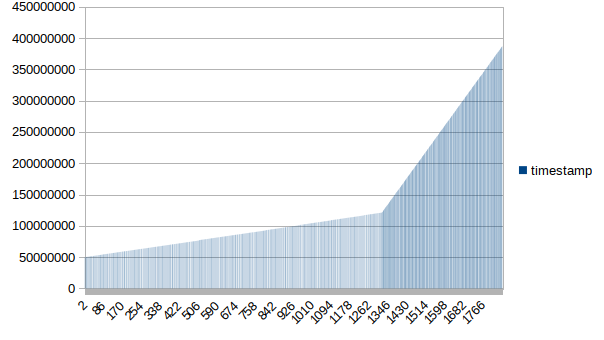
I am facing this weird issue, where once every five times, EKF stop working suddenly resulting in bad global position data. In the chart, from the timestamp, we can see that the EKF update rate has fallen.
After going through the other log messages, I see that sensor_gyro, sensor_accel and sensor_mag stopped publishing messages which cause sensor_combined to stop updating and hence EKF update failure.
Going through the code there seems to be only one way to block a device publication, which is systemcmds/config module. So what can be the reason for such block?
This happens once every five flights and I’ve seen it on multiple boards. The console is not available when it’s at high altitude. I will try to replicate it on a ground level. But how to test the mpu9250 status?