Hello,
I am trying to connect gazebo with mavros without a QGroundControl present,
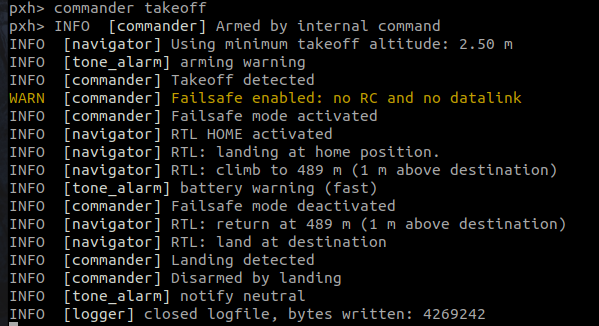
as the moment when I give a command to the aircraft for takeoff,
gazebo just write that its arming the aircraft, preform a takeoff without moving and land.
According to what I have read when gazeboo detects a ground control it will act normal I mean when a command to takeoff will be sent the aircraft will takeoff.
Is there a command that I need to send so that gazebo will recognize me as a ground control ?
Is there a change in the heartbeat message that I need to implement for the recognition to happen ?
Thanks.
- attached below a screenshot of what I mean when gazebo doesn’t perform takeoff command