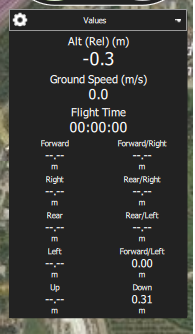
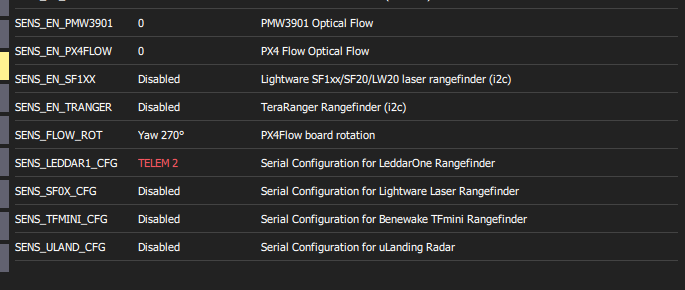
I’ve update the QGC (V4.0.11) and download the last firmware (PX4 Pro Stable Release v1.11.2). Then I put the parameter “SENS_LEDDAR1_CFG” at “TELEM2” for my leddar one by LeddarTech. The first value is display on the QGC by the telemetry but the value isn’t update. When I observe the mavlink inspector, there is no update for the distance sensor.
If I use the Garmin Lidar Lite V3 “SENS_EN_LL40LS” at “I2C” the sensor work well, the value is update but the orientation is “forward” and I would like to put it “Down” (distance between the ground and the plane" is there a parameter ?
Thank you for your response. And what about the LidarOne by LeddarTech (SENS_LEDDAR1_CFG = TELEM2) on the release/1.11 ? Is the sensor functional with this version?