Hello,
I have 2 drones with exactly the same setup (FMUV2, PX4Flow, no GPS), except for the range finder. One is using a Teraranger One and the other is using a TFmini.
The drone which uses the TFmini diverges much more for the altitude estimation even if the reported distance measured by the TFmini looks ok.
When I check the data I have a big difference with the value “distance_sensor_timestamp_rel”
Here it’s “distance_sensor_timestamp_rel” with Teraranger

This one is with TFmini
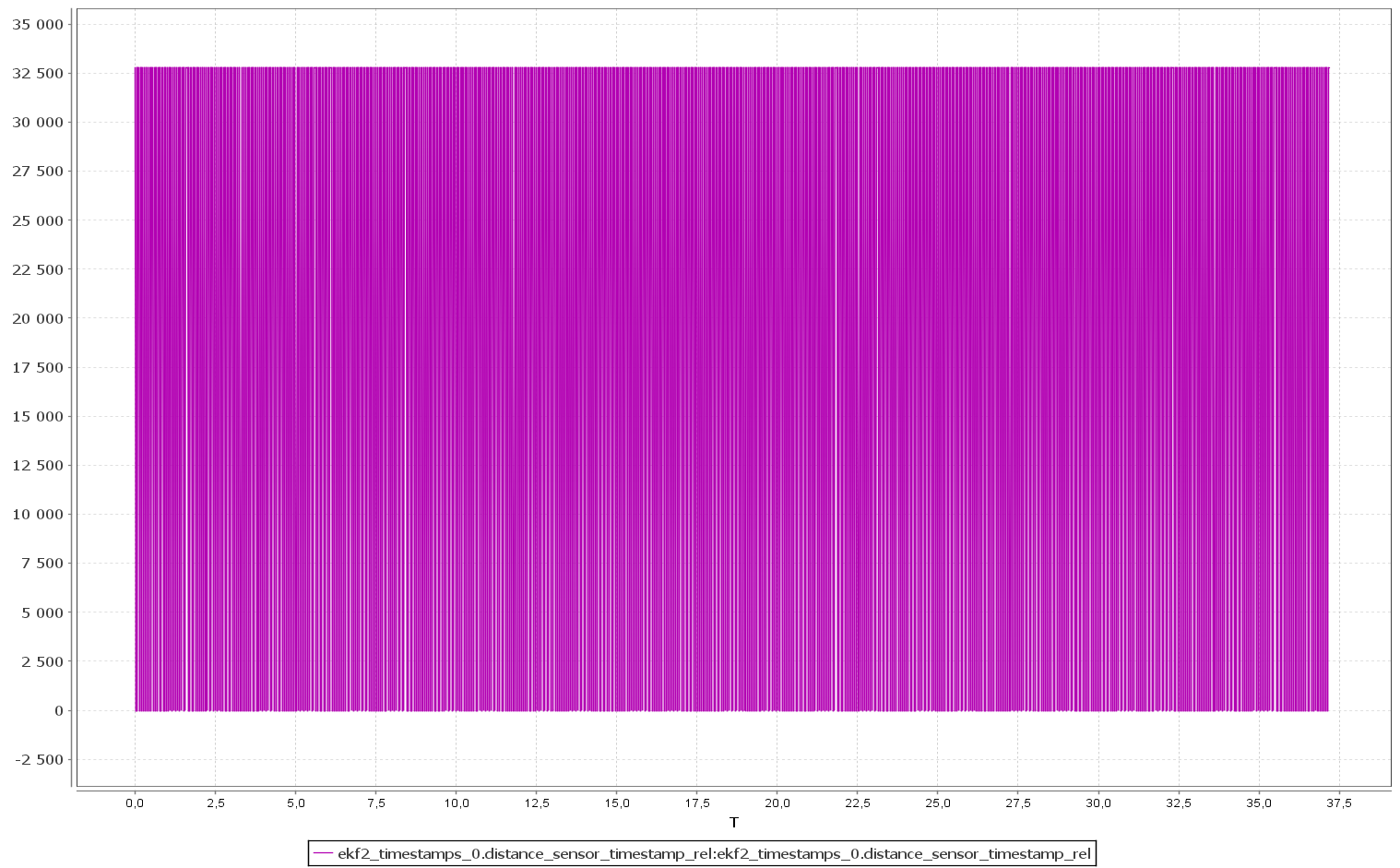
As we can see, the value of TFmini oscillates between 0 and 32500 while with the Teraranger it is between -30 and 10.
According to the source code, “distance_sensor_timestamp_rel” is calculated like this:
ekf2_timestamps.distance_sensor_timestamp_rel = (int16_t)((int64_t)range_finder.timestamp / 100 - (int64_t)ekf2_timestamps.timestamp / 100);
How can I interpret these data ? Does it affect the height estimation ?
Thanks for your help