I tried to change the world that starts with the simulator…
I sent the world_file_name argument as a parameter but it did not work
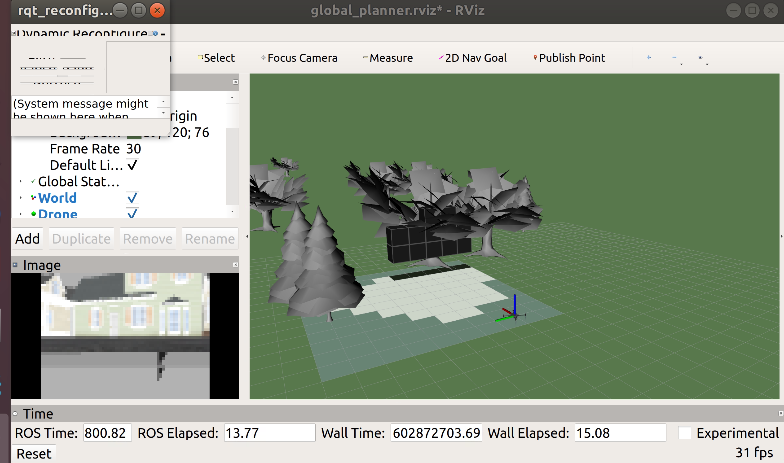
I modified the launch files on global_planner like global_planner_stereo.launch and changed the world_path argument to the path of another world in “avoidance/sim/worlds” but did not work…
I did the same modifications to the “avoidance/launch/avoidance_sitl_stereo.launch” and “avoidance/launch/avoidance_sitl_mavros.launch” but did not achieve anything
the whole global_planner_stereo.launch is
<launch>
<arg name="world_file_name" default="simple_obstacle" />
<arg name="world_path" default="~/catkin_ws/src/avoidance/avoidance/sim/worlds/outdoor_village_3.world" />
<arg name="pointcloud_topics" default="[/stereo/points2]" />
<arg name="start_pos_x" default="0.5" />
<arg name="start_pos_y" default="0.5" />
<arg name="start_pos_z" default="3.5" />
<!-- Launch PX4 and mavros -->
<include file="$(find avoidance)/launch/avoidance_sitl_stereo.launch" >
<arg name="model" value="iris_stereo_camera" />
<arg name="world_path" value="$(arg world_path)" />
<arg name="pointcloud_topics" value="$(arg pointcloud_topics)"/>
</include>
<!-- Global planner -->
<include file="$(find global_planner)/launch/global_planner_octomap.launch" >
<arg name="start_pos_x" value="$(arg start_pos_x)" />
<arg name="start_pos_y" value="$(arg start_pos_y)" />
<arg name="start_pos_z" value="$(arg start_pos_z)" />
<arg name="pointcloud_topics" value="$(arg pointcloud_topics)"/>
</include>
<!-- RViz -->
<node pkg="rviz" type="rviz" output="screen" name="rviz" respawn="true"
args="-d $(find global_planner)/resource/global_planner.rviz" />
</launch>