Hello,
We’ve discovered some unusual behavior in the Pixhawk 4 mini’s horizontal velocity estimates. To call the problem a bug is generous. It’s a full failure with no clear indication of the problem. We are investigating.
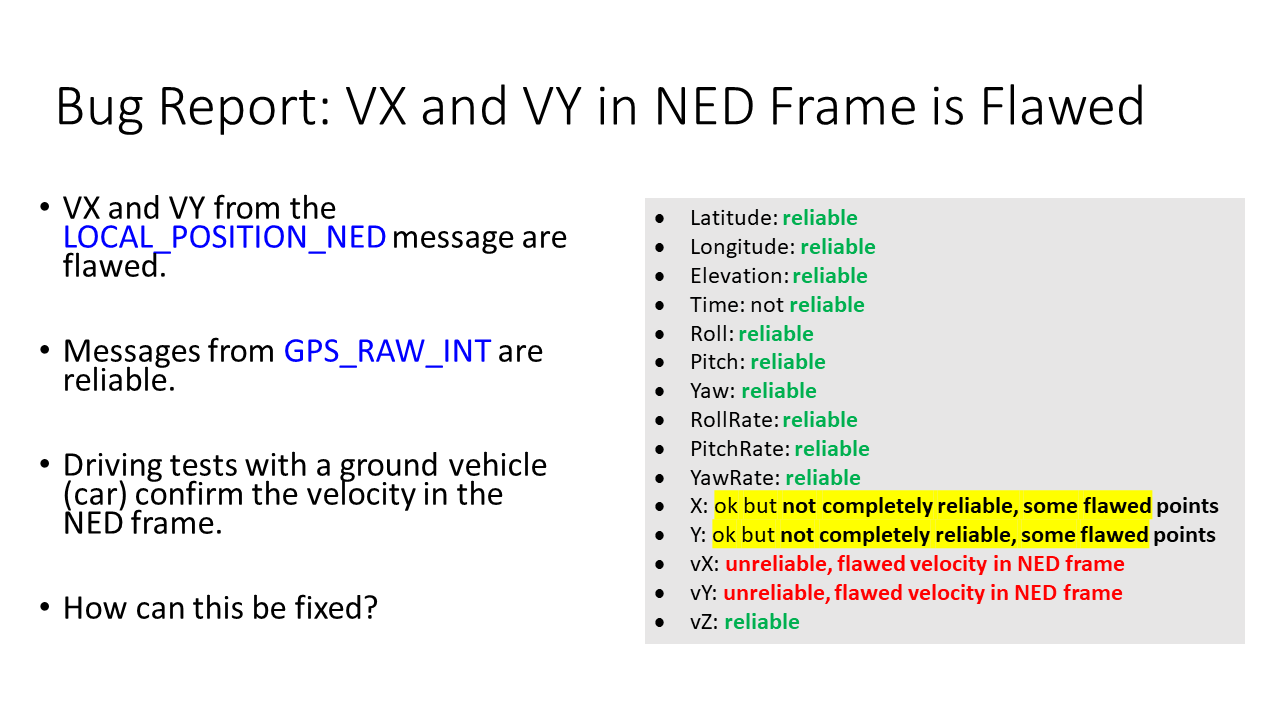
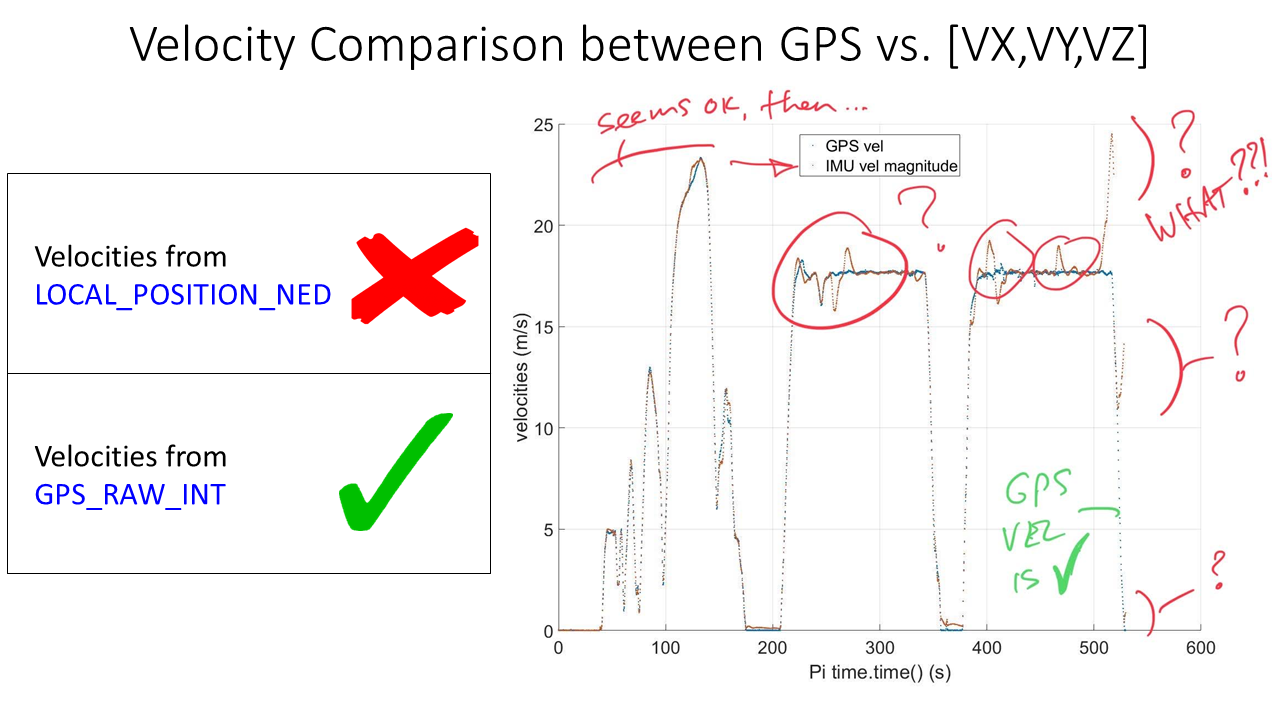
Has anyone else experienced this? The velocity in VX and VY in the Earth-fixed NED frame (North-East-Down) is the problem.
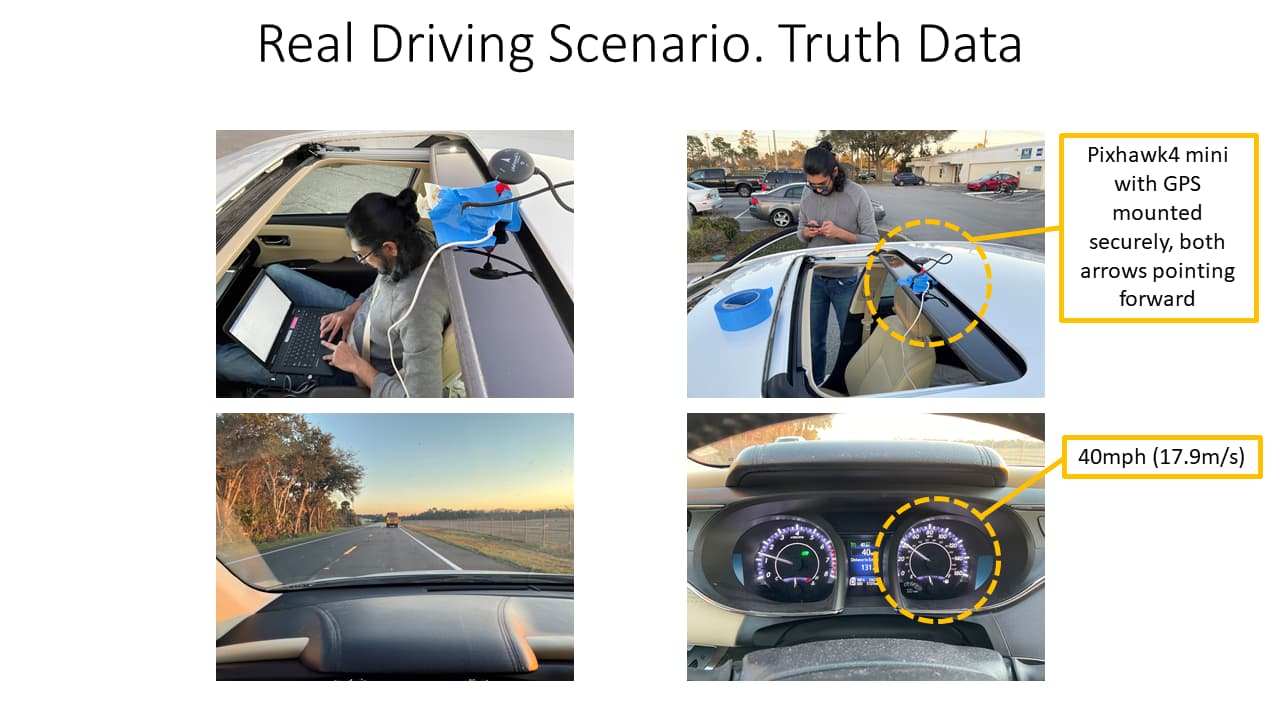
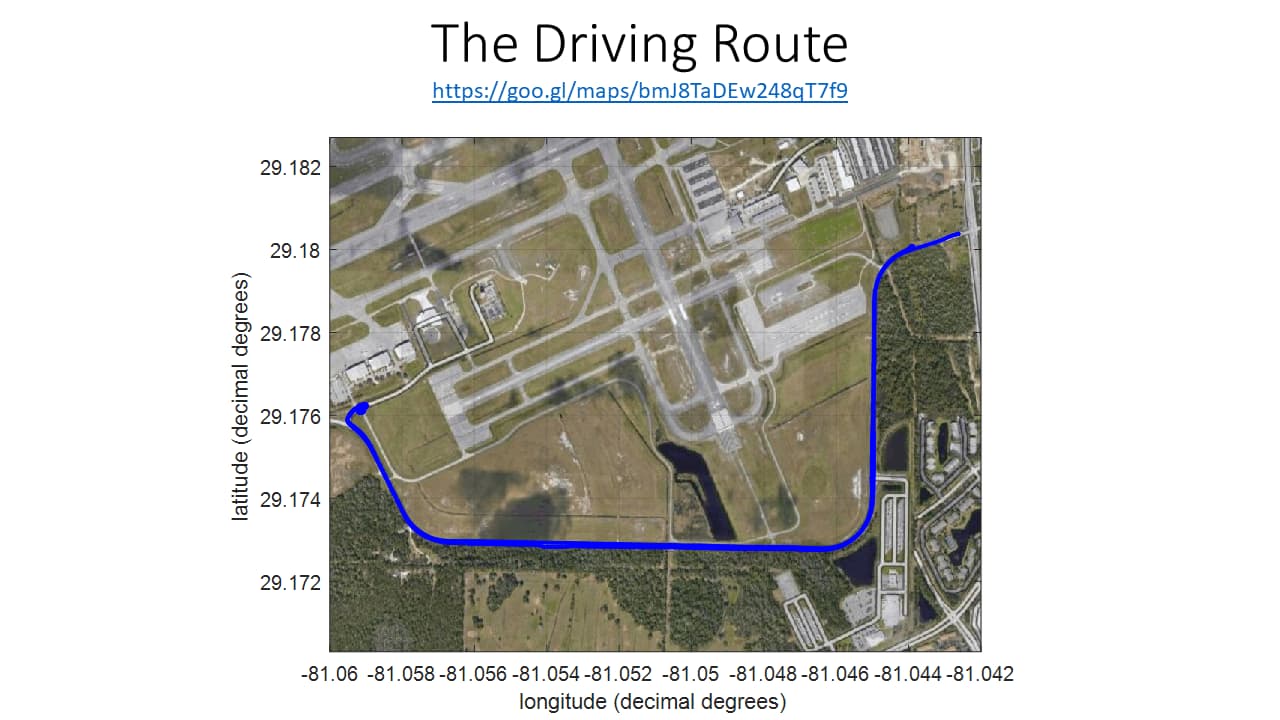
To make sure this was not an error in our code, we took the Pixhawk4 mini on a drive in a car with known speed (40mph or 17.9m/s) on a road with almost perfectly aligned drives in the North-South and East-West directoins.
These slides were reported to HolyBro and we are awaiting a response.
The error seems to be in the LOCAL_POSITION_NED message. The GPS_RAW_INT message is good.
These VX and VY estimates are pretty much wrong. How can this be fixed? Is there a firmware update? Can we just change Kalman filter fusion settings?
The test code is available,
Marc Compere
Slide 2 of 9:
Slide 3 of 9:

Slide 4 of 9:
Slide 6 of 9:
Slide 7 of 9: