Hi there. I trying to solve problem with ekf. Deal is i have bad solution ekf pose estimator GPOSE (with gaps) when GPS data is accurate. I have no idea what the reason. May be someone can give me advise how I can analyze it or what can be the reason.
x,y,z
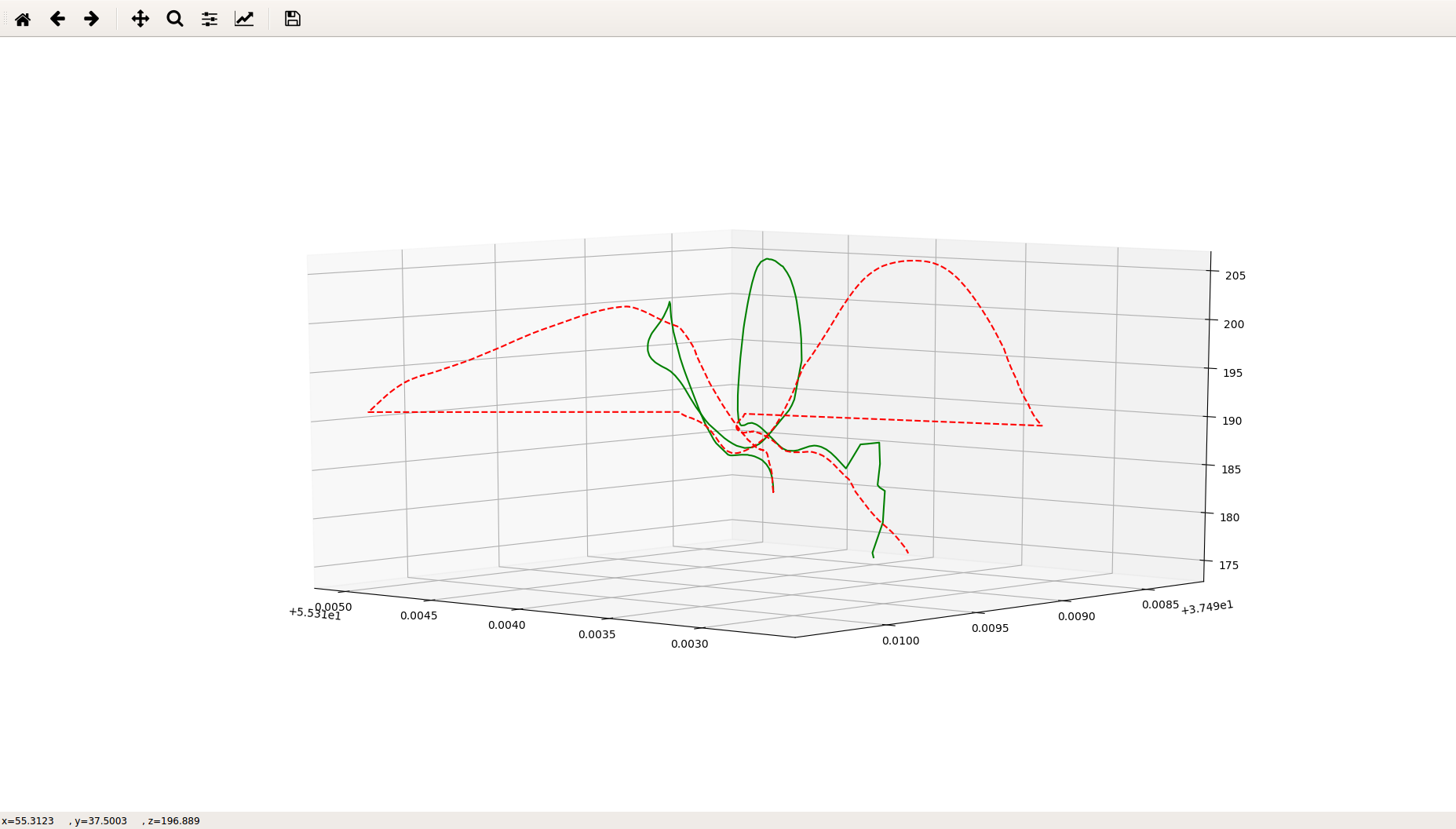
red - gpose
green - gps
lat(t)
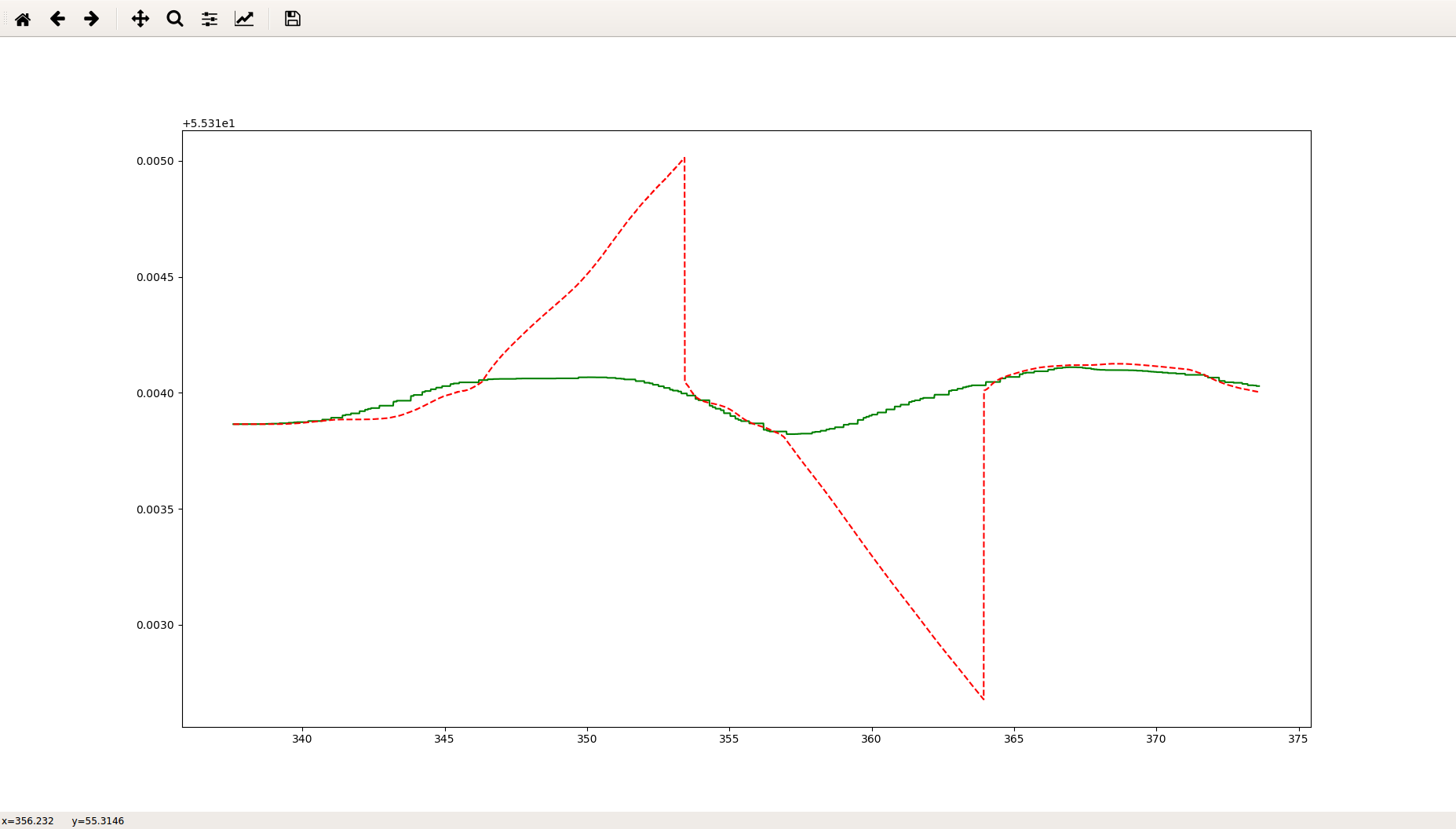
red - gpose
green - gps
would be thankful for any idea or help
P.S. unfortunately i haven’t a new log format file, only old “.px4log”