Hi there,
I’ve tried the offboard example on the manual and the quadrotors is supposed to stay at the point:
local_position_x = 0, local_position_y = 0 and local_position_z = 2m
The drone take off fastly and then drift to the left fastly and I don’t know why.
The flight log is as follows:

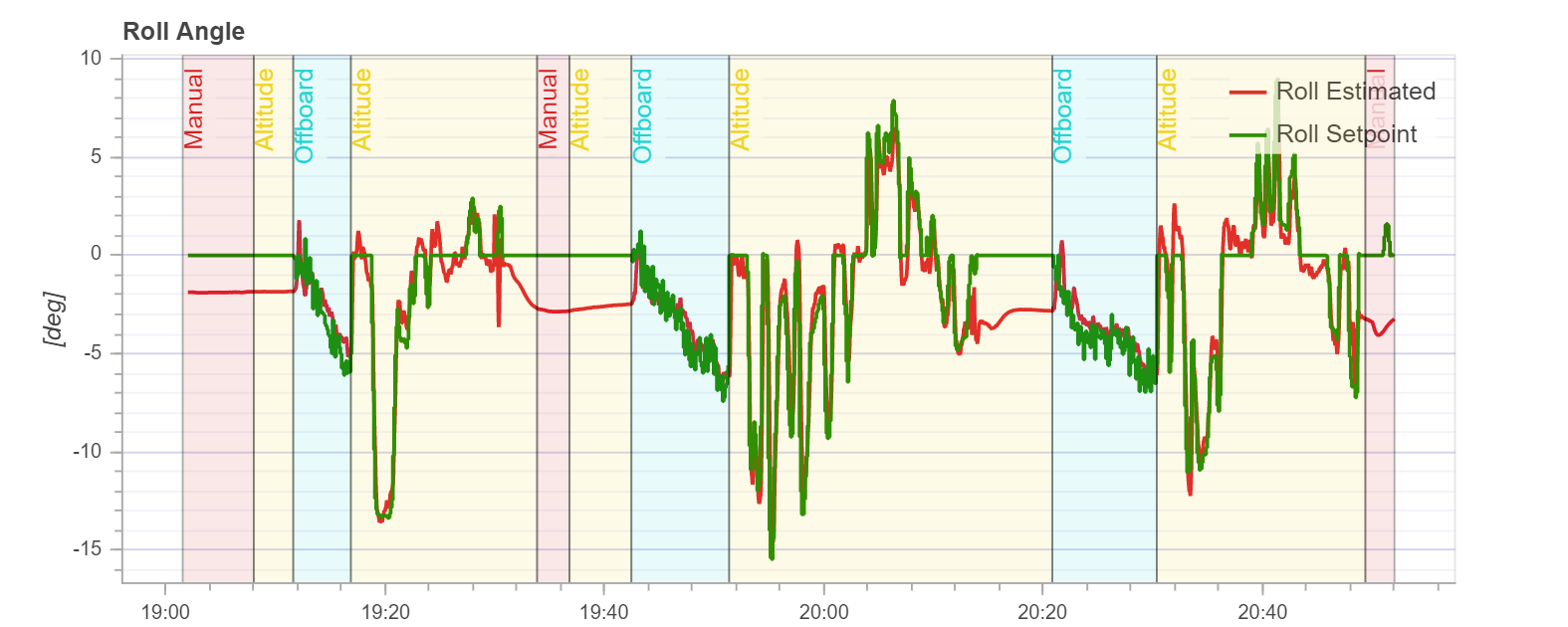
During the offboard mode, the set point of pitch and roll angle is supposed to be zero, right? why it is getting bigger?
Can anybody help me ?