Hello all,
I attached px4flow on the bottom of a drone and connected its sonar pwm signal to AUX5 to be fed into LL40LS pwm input.
This setup give me an estimation of height above terrain however the data contains lots of noise and peaks as seen below.
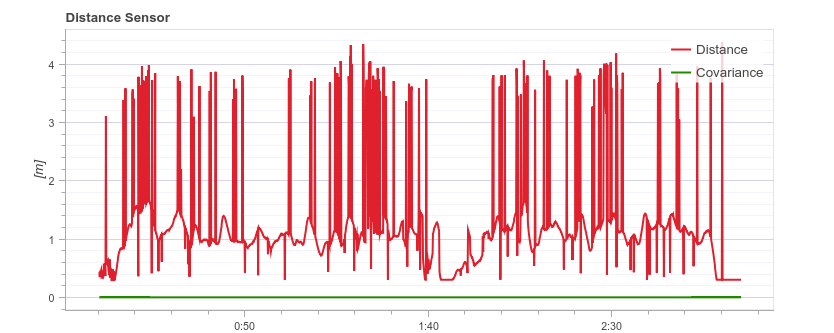
It looks like there must be some kalman filtering in the process of the data but the given data does not show any changes in covariance. To my understanding, when data get corrupted either by external or internal process, covariance matrix should reveal those errors.
Is there any reason the sensors not updating covariance for instance? Or please give me any advice on this issue.
Thanks,
Kyu