Hi,
after some first successful radio controlled flights using PX4, I carried the board, had a look at the angular rate data published by mavros under the topic: /mavros/imu/data_raw/angular_velocity and was surprised. It doesn’t look as expected.
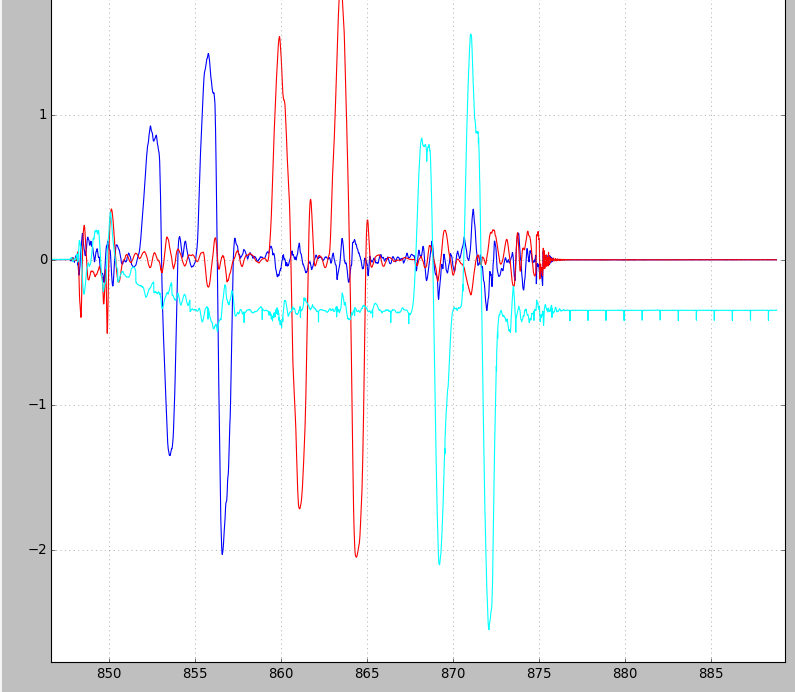
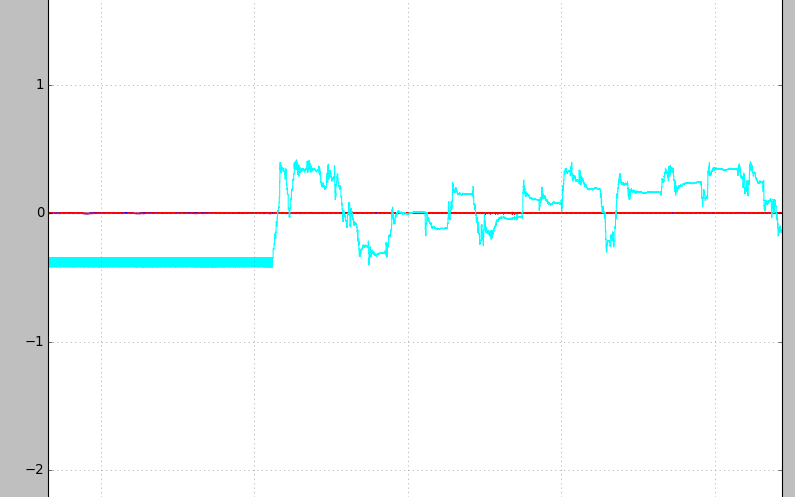
Initially angular velocities are close to zero and look fine. But when the board is moved an offset around the z-axis is visible, which also doesn’t disappear when putting the board back on the desk. In addition, after moving the board, regular spikes are visible in the signal.
Also after some time the offset around z axis changes in a strange way although the more was not touched again.
The time scale is different in the second plot is different from the first plot. Therefore, the spikes look look like a bar.
Do you have any ideas about the causes for such a behavior?
@brishker would you have a flight log of the vehicle? It is hard to know what is going on only with the provided information
It would also help which version of PX4, mavros and any other details that you think relevant is provided
@Jaeyoung-Lim Thanks for your reply!
Today I tried to reproduce the behavior from two days ago. But I could not. It still does not look good, but different.
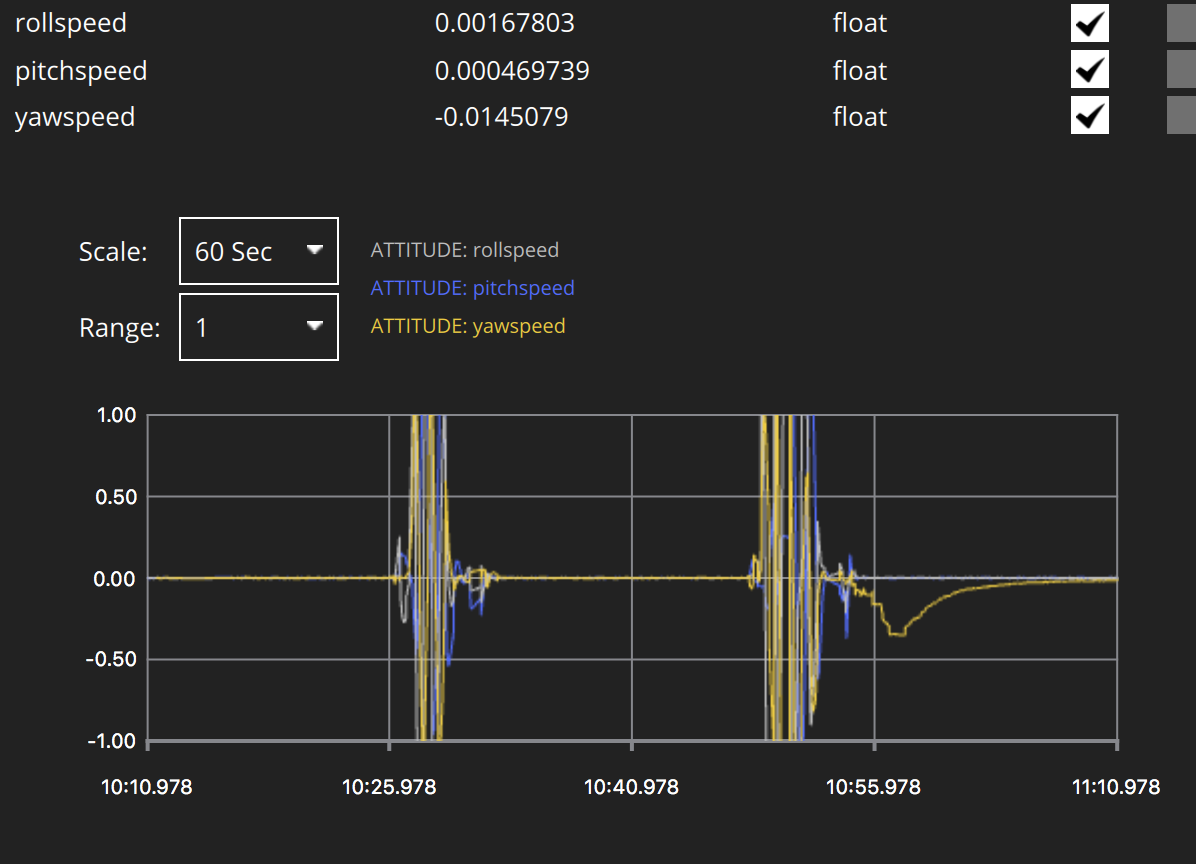
Below is a typical plot of angular rates as shown by QGroundControl. So mavros is no longer involved. After moving for some seconds, I always kept the board as static as possible. Nevertheless, there is something strange happening with yawspeed. I suspect it could be some configuration issue? I set the params EKF2_MULTI_IMU and EKF2_MULTI_MAG to only run a single EKF instance.
And I’ll look for the exact hardware and software versions of pixhawk now…
@brishker Please share a log that has the recordings of the issue.
Screenshots contain very limited information and we can only speculate what could have been the cause of your problem. The fact that you cannot reproduce the issue might suggest that the issue is not coming from a single point, and therefore it is important that we are looking at the full picture.
Best is if you can upload the flight log on flight review and share the link in this post. If you are unsure how to do this, please find the instruction in Logging | PX4 User Guide
Thank you very much for your reply. Please find the following log file: https://review.px4.io/plot_app?log=5bd86159-f415-45da-9be1-6d200f5e319d
It corresponds to the following screenshot:
@brishker You can see that this is not related to estimation at all, because the raw magnetometer and gyro, accelerarion is measuring a huge surge of change.
Any chance you know where this is coming from? There is some equipment around the vehicle that vibrates and generates a magnetic field, or it is coming from the vehicle itself.
What is happening on the vehicle? Did you move an actuator?
I cannot identify any magnetic disturbance in the environment. I only carry the vehicle, there is no other component on the UAV active at that point. I also tried it with another pixhawk from the same type on a uav frame, which has basically no other component on it (Holybro X500 V2, the power distribution board had no power) and get the same result. I also moved around a bit to see if the effect is less, but cannot really see a too big of a change.
@brishker I think we really need to find out where the magnetic interference is coming from (whether it is your environment if not the vehicle). Or if there is actually no magnetic interference and you are getting corrupted data.
Otherwise it is really hard to pinpoint where your problem is coming from