Dronecode
PX4
QGroundControl
QGC
MAVSDK
MAVLink
Documentation
Docs
Support
Help
Discussion Forum for PX4, Pixhawk, QGroundControl, MAVSDK, MAVLink
Abnormal climb ,why and how to solve
PX4 Autopilot
Flight Controllers 💻
cecily
June 13, 2022, 10:39am
1
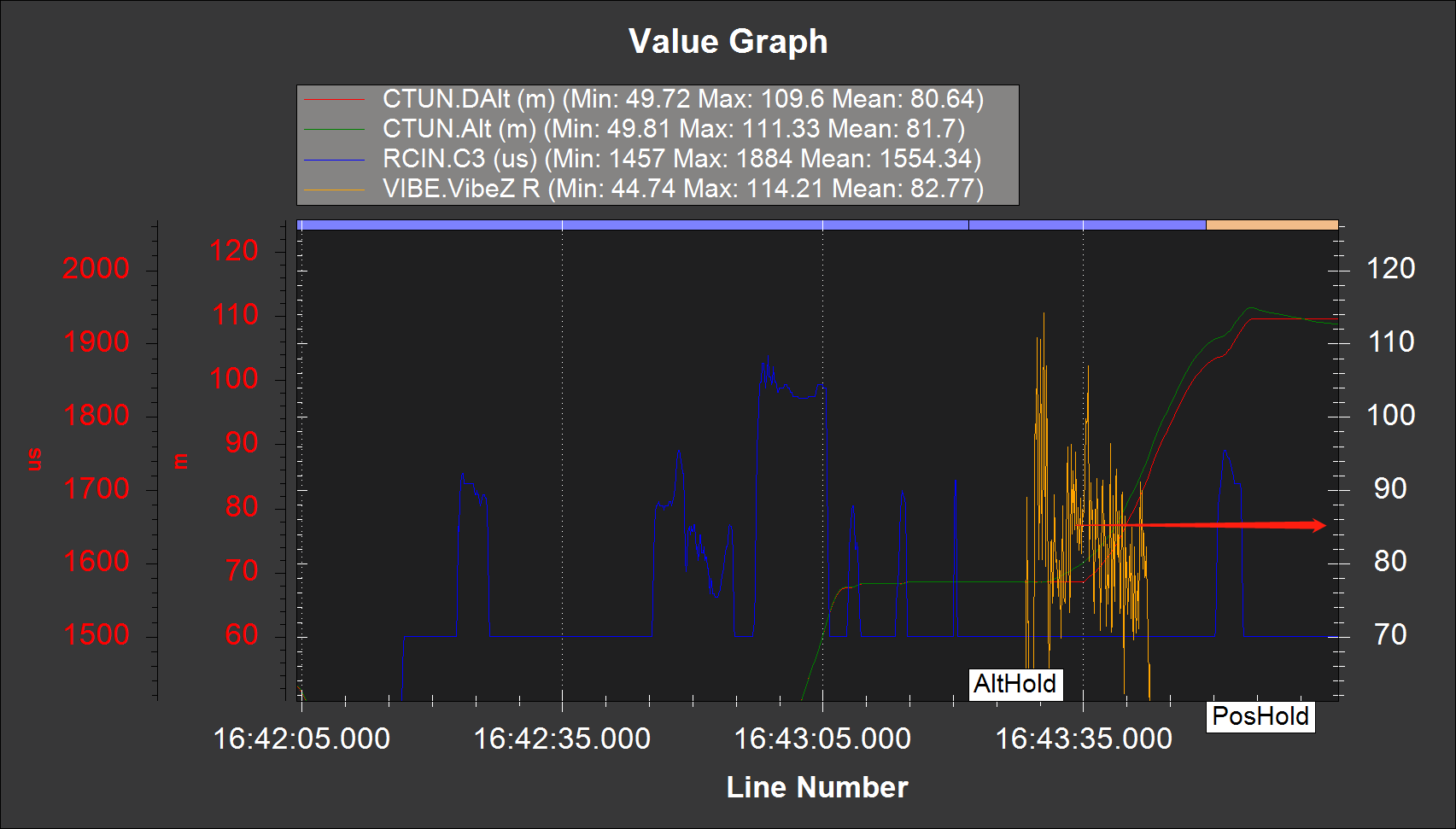
image
1705×971 31 KB
bin file link:
(
https://pan.baidu.com/s/1raKvAXL-qU_WCO4xb_vlUg
) code: ur6c
Q1: Why does the target height change when the vibration gets larger,
Q2: How much vibration value is considered normal?