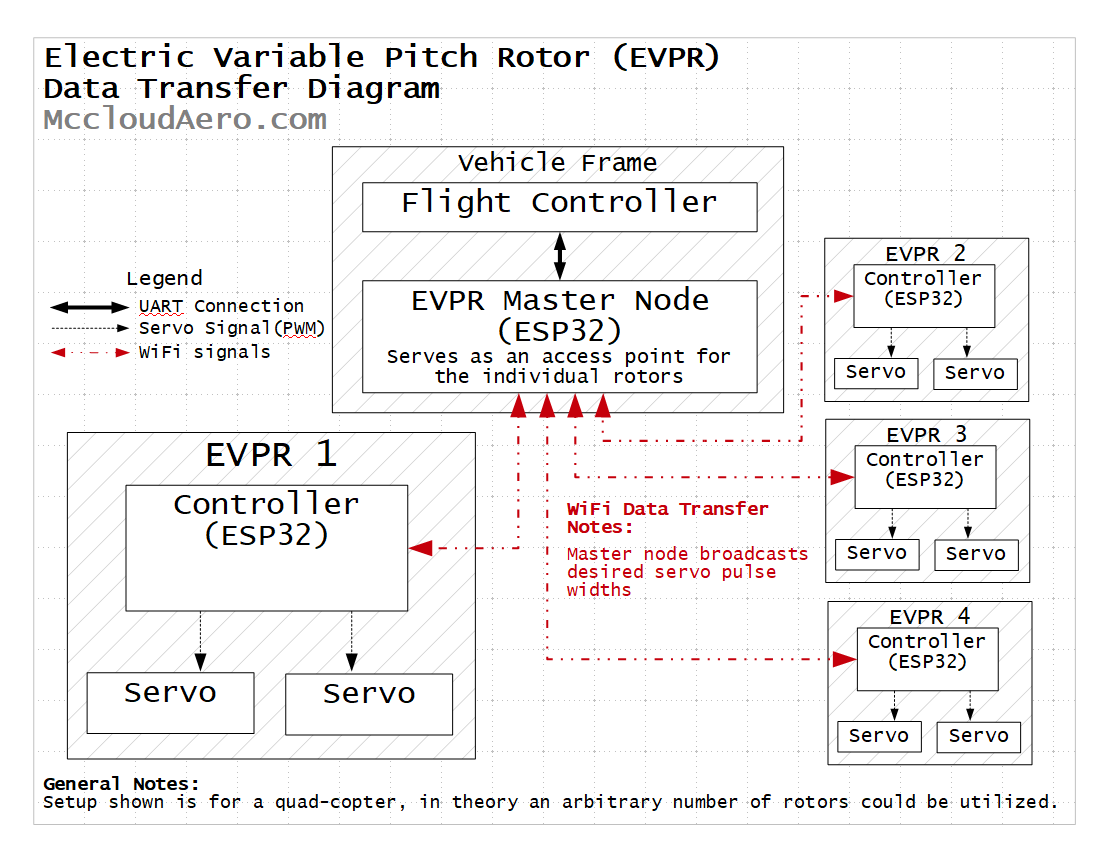
I thought I’d post this here in case anyone else might need it for there project. In developing an electric variable pitch rotor, I wrote some basic code that essentially serves as a WiFi bridge for servos. The diagram explains how the servo commands are sent:
There’s a lot of work to be done to add error checking and redundancy to the code, but if there are other projects out there that can use, the code for the ESP32s and the PX4 drivers can be found in the github repostory:
Video of the working rotor is at:
https://www.youtube.com/edit?o=U&video_id=tHBNrU7rWF0