Please advise :
My quadricopter Kit Tarot 650, Esc 40A, Motor 640kv, propeller 1555, battery 3S 5400mAh 30C( I have 3 pack are same kind), Total 2Kgs include battery.
It is just flying 4-5 minute.
Attactched file log Mission Planner ( fw pix4io upload by QGC)
Please show me, why it is flying too soft time.
Rgs
Reed Noel
Are you using Arducopter or PX4? I’m guessing Arducopter based on the log file extension. You should probably go their to ask about autopilot firmware specific issues.
You can download it through QGroundControl, or directly copy from the sdcard. If it’s a .ulg file upload it here http://logs.px4.io/
1 Like
Dear all,
Now, I reset to default and buy a new battery 3S 5200mAh, but just flying 8 minute.
with the end of 8 minute, i so twitchy and I switch it landing. So when check battery
show log file and help me with many thank.
https://logs.px4.io/plot_app?log=c6b16247-5088-4140-8b02-e254cda9dc5f
And bellow is my config file:
Rgs
Reed Noel
Hi Reed, do you have any specific questions about that flight?
Hi sir,
When time of flight is 8 minute, my quad twitch and I landing. So after check, motor 3-4 (CW) overheating. Please advise, how to fix it.
Thanks
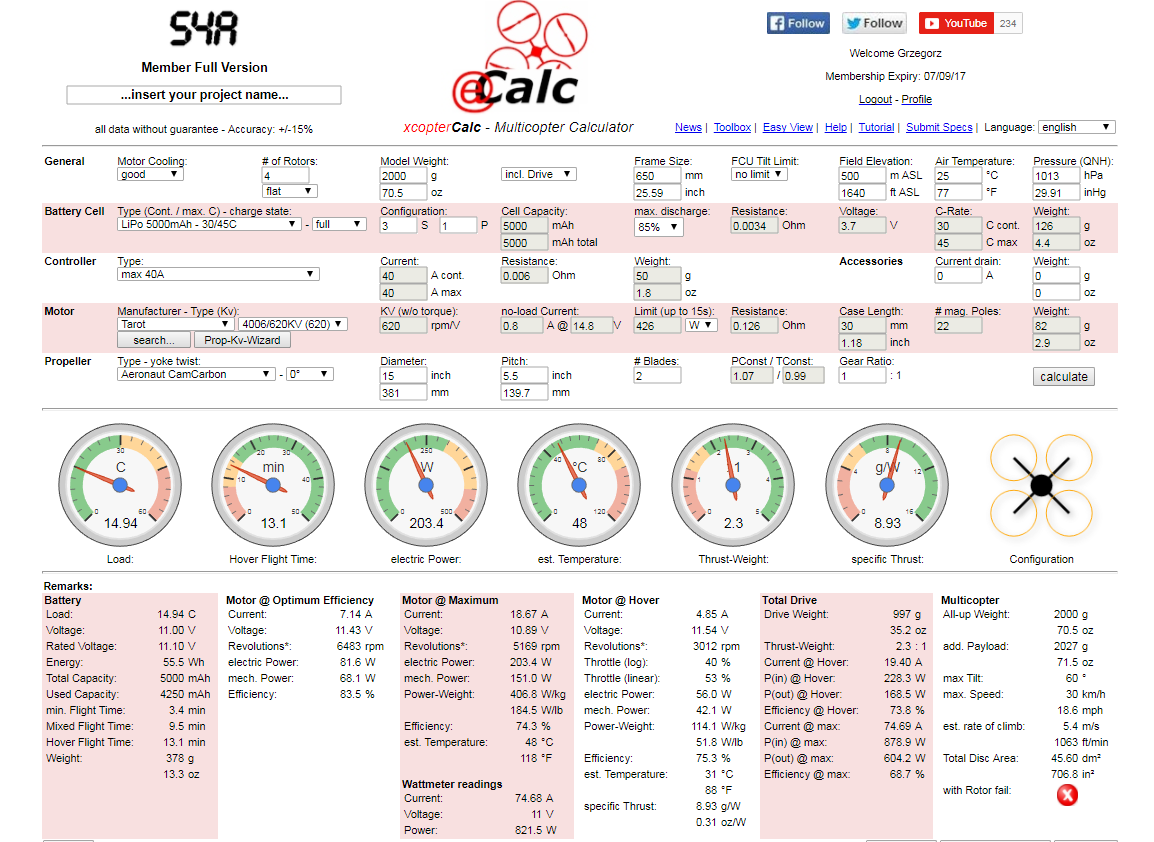
According to ecalc.ch you should get approx 13 minutes hover +/-15% So there is definitely something wrong.
I will have a look at your log file and let you know.
Dear @gregswf,
many thanks for your help.
I waiting for your support, I don’t know where is wrong.
Thanks again.
Reed Noel
I think it is worth looking at the overheating motors first as this can cause a short flight time.
from your log it looks like your yaw working good but two CW motors overheating suggests that those two motors work harder to maintain the yaw orientation.
I assume that you are flying without the gimbal and the camera, adding the weight of the gimbal and the camera will make the flight time shorter.
Please do following checks.
- disconnect motors from escs and try to spin motors by hand check if all motors feel the same, if there is any mechanical issue like bad bearings or something stopping the motors mechanically then the motors will experience higher load and current draw witch will cause shorter flight time.
make sure all motors a levelled, if you set them at a small angle to improve yaw authority check if the angle is in a correct direction. Tarot frame uses round tubes as arms, this makes it difficult to set motors levelled, if motors are set at an angle in a wrong direction it will affect the yaw authority and might make motors work harder and overheat. - try different motors
- check ESCs, do a ground test of one motor with various ESCs and check temperatures.
- check ESC settings make sure the timing is set up the same on all ESCs.
I hope this helps, please let me know
I have just had a look at your graphs, in “actuator controls 0” yaw is always around -1, when the frame is balanced and there is no mechanical issues I’d expect it to be around 0 like pitch and roll.
It looks like something was trying to turn the quad one way and the FC is compensating for it.
I the “Actuator outputs main” output 2(motor 3) and 3(motor 4) is larger than 0(motor 1) and 1(motor 2), again in a balanced machine in a state of hover these should be closer together.
Thanks Sir, let I check and do it.
But now, my pixhawk can’t update firmware, It already have the px4io firmware ( stable firmware) so I can modify anything. I trying with your help load firmware thru uart, but cann’t, qgc and Mission Planner allway request " Plug usb"
Thanks
Rgs
Reed Noel
Hi, have you been able to solve this issue?
Hi deksprimer,
I see in the logs file, If which motor high RCOU, I tile it a small degree.
Fly and do it again
Reed
Hi @gregswf,
I haven’t seen you for along time,
Now I change to Kit Hexa 810, with 6 motor Sunny Sky 3805-380kv .
Please show me, select best esc for it.
In my local, easy buying :30A or 40A ?
XRotor-30A-Micro-2-5S-BLHeli_32-Dshot1200
or T-Motor F30A V2 2-4S ESC BLHeli_S Dshot Oneshot125 Oneshot42 Multishot
Thanks
Reed