In the lpe,the function of covariance prediect as followed:
void BlockLocalPositionEstimator::predict()
{
// if can’t update anything, don’t propagate
// state or covariance
if (!_validXY && !_validZ) { return; }
if (integrate && _sub_att.get().R_valid) {
Matrix3f R_att(_sub_att.get().R);
Vector3f a(_sub_sensor.get().accelerometer_m_s2);
// note, bias is removed in dynamics function
_u = R_att * a;
_u(U_az) += 9.81f; // add g
} else {
_u = Vector3f(0, 0, 0);
}
// update state space based on new states
updateSSStates();
// continuous time kalman filter prediction
// integrate runge kutta 4th order
// TODO move rk4 algorithm to matrixlib
// https://en.wikipedia.org/wiki/Runge%E2%80%93Kutta_methods
float h = getDt();
Vector<float, n_x> k1, k2, k3, k4;
k1 = dynamics(0, _x, _u);
k2 = dynamics(h / 2, _x + k1 * h / 2, _u);
k3 = dynamics(h / 2, _x + k2 * h / 2, _u);
k4 = dynamics(h, _x + k3 * h, _u);
Vector<float, n_x> dx = (k1 + k2 * 2 + k3 * 2 + k4) * (h / 6);
// propagate
correctionLogic(dx);
_x += dx;
Matrix<float, n_x, n_x> dP = (_A * _P + _P * _A.transpose() +
_B * _R * _B.transpose() + _Q) * getDt();
covPropagationLogic(dP);
_P += dP;
_xLowPass.update(_x);
_aglLowPass.update(agl());
}
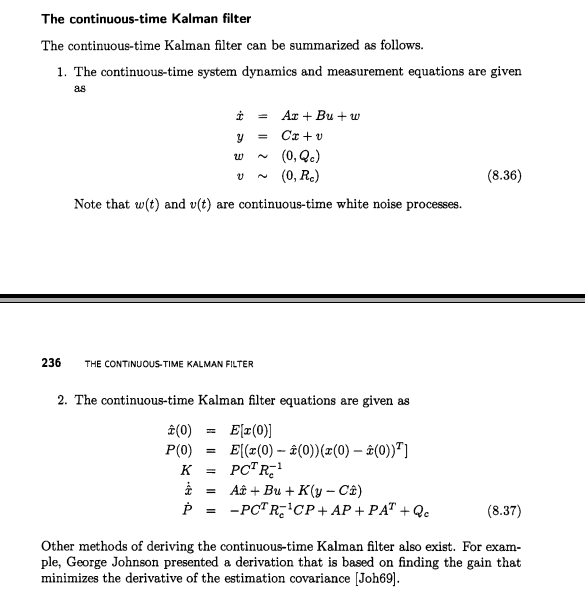
But I read the book about continuous time kalman filter,It show the formula of it as followed: