I am rising the system. I can get it to work on a regular laptop but not a surface pro. The issue on the surface is once the calibration is don’t the slider on the right hand side does not appear to finish the calibration. The other thing that happens is as you work through the calibrations one of them randomly will not register the rotation and the box stays yellow. The option here is to move to the next position and rotate or get dissy until it times out and fails. If you continue to move to the next positions once you complete them all the previous position in yellow turns green. At this stage on a laptop the slider on the right appears with compass orientation and you can complete the calibration. On a surface pro 4 the slider does not appear and the calibration times out. Both laptop and surface are on Windows 10.
Another thing I noticed is sometimes in the flight mode screen writing will show up at the top that says RC -1 Rev parameter missing. Sometimes it appears and sometimes it doesn’t. If I click out of flight mode screen to another tab sometimes it disappears.
here is the consol log of 2 rotations that it would not register. also, the esc calibration is still saying failed verbally after it completes and the esc makes that chime.log.pdf (138.4 KB)
retested today with daily QGC (522) and Developer Master Build. I noticed:
Messages Overlay does interfere with UI Components which are behind. I.E. when I try to scroll the Messages the Map would Zoom. No matter where I place the Pointer to (Mac with Touchpad).
Once I had an Issue where QGC was only kind of half connected. It showed current Voltage (with updates) and announced an Alarm, but the Message List was Empty and the Settings View was showing only Firmware and Summary as if it was disconnected.
Ampere Metering finally works. The Error was the Soldering Iron Handler who connected ACSP 5 wrongly (ESC vs. BAT Side). Stupid me!
Please Clarify the Meaning of Geofence “Return” Action. Does it RTL or only “Return”. If only Return how would it behave? Please change to “Return to Land” or describe.
Have you had a chance to see why I was once asked to press Safety Switch on Pixracer? Initialisation Bug?
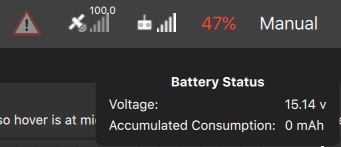
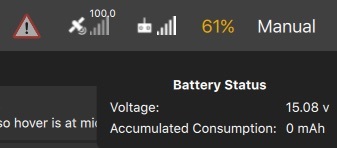
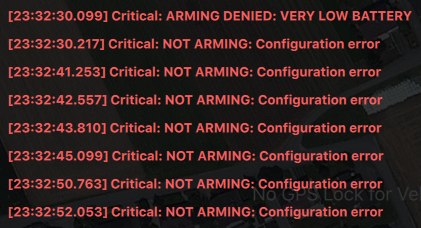
Strange Behaviour of Battery Voltage observed. When I tried to arm the vehicle would deny with “Very Low Battery” - despite just before Arming it showed 61% (15.1V for 4S), then during the Arming Command the Battery percentage dropped to around 40-45% (still showing 15.1V!!). See Pictures:
During Arming:
After Arming (same as before):
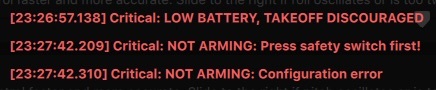
And this is what the Messages showed - Again the Safety Switch!?
But not only due to the Safety Switch Issue - after a Reboot same thing happened.
So far these were only “Dry” tests in the Basement. Maybe I’ll try to fly it tomorrow. Would be the first flight outdoor
I found a few things that were not optimal on the battery metering side tonight and pushed changes. I haven’t flown them yet but will try tomorrow. You will want to update from beta again before trying to fly.
Correct me if I am wrong but that limits the trigger cables you can use since half of them are pwm based like the seagull mapping cables for Sony cameras?
PWM is actually much easier from our perspective. The core is to understand what people really want and then to properly support it. We have no interest in badly supporting everything - we rather support one approach, but well tested and maintained.
Well, that whole Seagull thing is for when all you have is PWM (such as a regular RC receiver). With the logical output, you can connect it directly without any adapters to any camera.
Let me rephrase that: There is no need to convert from PWM to a logical signal. You would still need to make sure the 3.3v logic is compatible with whatever you are trying to trigger. With that said, there is no reason the Pixhawk couldn’t be set to work with either mode. PWM for those who want to use some PWM to TTL adapter or straight TTL for the rest.
Since all of the cables use PWM you would be limiting px4 to only triggering cannon s110s with CHDK and no other camera since all trigger cables are built around PWM.
For example Sony uses multi terminal and has to be controlled through the cable.
It’s a chicken and the egg problem. Up to now, the only way to get a signal to trigger a camera was using an RC channel, which uses PWM. Then people came up with all sorts of circuits to convert that into a digital switch, which is all those cameras understand. By outputting a direct, TTL trigger signal, it makes these triggers (from an electronics point of view) a whole lot simpler. In other words, instead of spending €50 on a PWM switch, the circuit could be built for around €0.50.
Again, the Pixhawk can be programed to output either one. PWM or TTL. We just need to add an option so you can select PWM output instead of TTL.
That is amazing. Do you know what part I would need for TTL triggering besides the specific camera cable type? I assume outside of mapping for basic shutter we would still require PWM for copters where you control zoom, shutter focus, on/off etc.
I simple mapping cable like you describe would be highly desirable.
It depends on the camera. Usually, it’s just 3 pins (normally a 1/8" stereo audio plug or something equivalent). It provides a ground and two contacts. One for pre-focus and another for the shutter. All you need is to short the pins into ground. A normal remote switch is just a mechanical switch. An electronic switch can be made using a standard NPN transistor pulling the pin to ground when a voltage (from the Pixhawk) is applied to its base. A safer circuit, and not at all more expensive would use an opto-coupler to do the same. I can draw something up and put it here tomorrow (or later today at this point). Better yet, I should probably create a Wiki entry for this. I just need to do some research on what types of remote switches are used by the various cameras.
I have now reduced the number of mag sides to 3 and robustified the wireless calibration. I would be interested if mag calibration works now fine over wireless for most people.
That sounds like a much better way to trigger cameras then the old PWM way. A detailed wiki on the camera triggering would be extremely helpful since this will be completely new for everyone switching from APM. With that being said, I think it may be a good idea to offer a simple legacy PWM triggering method as welI. This is for because people switching to px4 may have a pile of trigger cables for different cameras and camera functions that they know work rather than guessing if px4 supports there camera and functions they use. How does hotshot camera feedback work with this setup? All the documentation I could find is what Tridge wrote here about it for PX4. http://discuss.ardupilot.org/t/fast-camera-trigger-capture-in-master/8450
Compass calibration is much better now with only doing 3 different rotations and on 900 MHZ radio. There is still an issue on a Microsoft surface where after the calibration if complete the compass sensor does not check off complete (stays red) and you have to restart QGC and the plane for it to take effect.
Still see the following other issues.
MC speed parameter missing
ESC verbally saying calibration failed after the chime and saying complete on the screen
camera layout in summary still looks bad
am I supposed to be able to shake off the plane if I want to cancel a mission start due to last minute issue after its shook on.
@LorenzMeier, I noticed that FrSky D-type telemetry is broken in the current beta (also in master). It was working when I last checked (with a master build as of April 10 and also a beta downloaded early April). --> https://github.com/PX4/Firmware/issues/4408