Can flow module through jtag interface debug it?
@gervais I’ve fixed the telemetry issue - I disabled receive for OSD which is the default on TELEM2 - stupid mistake.
I updated the beta and master branches with the fix. We also discovered that there might be a better tuning for small quads / racers: Could you help us testing that here?
This could be a potential hardware corner case where a pulldown is missing. I have filed https://github.com/PX4/Firmware/issues/4293 to track this.
In other news: I just updated the beta branch with a couple of fixes, in particular for single switch flight mode selection. Basic re-testing would be appreciated. Just manual flying and preferably a small mission.
On the failsafe question: I will respond to that separately. I think it mostly needs fixes on the QGC GUI side.
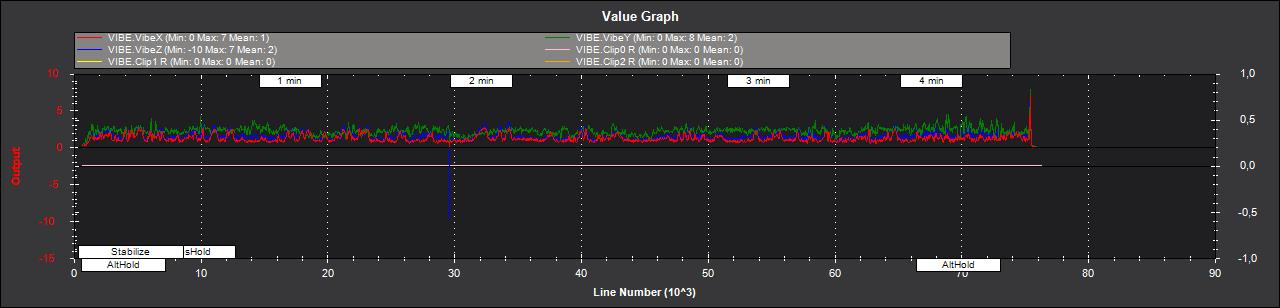
Thx, tried latest Master of yesterday noon with Quanum Nova and F450 defaults. No recognizable issues, although I still need some more “deadband” for Althold. Quite a bit too nervous, although the baro is covered very well and inside the “Nova box”. Is there sth. like an EKF_ALT_NOISE Parameter ? I checked vibs via APM vibe 3.3 log , definitely superb, http://fs5.directupload.net/images/160416/4voyr6zb.jpg , so this is not an issue.
Flight mode assignment (Stab,AltHold,Pos Ctl.,Land by Mixer) was easy.
Compass Cali with daily QGC was a little confusing, since some of the axis (not always the same) turned yellow but did not turn green. Nevertheless,the Sensor health showed green after a few trys, so I cared less, since YAW was correct.
Despite these littles, I´d personally consider this version safe to fly.
Update: I really enjoyed several batteries flight with todays master (@ F450 PR r12) , and the QGC Android app, (Higly appreciated, the new scrollable tuning pages @5.5", all in all great usability)
Compass cali behavior was the same I mentioned yesterday, although all remaining yellow fields turned green @ finish…
Formerly supposed Althold “issuses” were gone after I turned the tuning slider to the mid. Still have to re-adjust my PosCtl.settings which appear to swing back (lock) too hard.The associated tuning slider did not help , not sure what it does at PosCtl.) All in all I´m very delighted.
Small cosmetic flaws:
1.Experienced incredible high (9 digits) accumulated battery consumption. Don´t need that anyhow, could be as well hardware on my side.
2.Always after moving the tuning slider, Manual Control lost appears (nothing lost though).
Besides that Failsafe Options OFF and LAND are still not available , I´d consider this dev version as fool proof (at least for my simple quad builds)
Thx a lot,guys !
Installed latest Master on Pixracer and AUAV-X2 using QGC Build 418. Having nonsense Values for Accumulated Consumption of the Battery before, there is now higher Values jumping between 0 and fantastic values. It does not matter if there is a Current Probe attached (i.e. Controller only attached to USB or if there is a real Current/Voltage Probe).
Could someone explain the meaning and source of this value? Apparently it is not just an addition of actual current consumption since it can jump to any value. Anyone has good Values for ACSP 4 and ASCP 5? For ACSP 4 I needed quiet a lot of try and error to adjust voltage while ACSP 5 with factory defaults was on spot. Still my Current Readings are quiet wrong. There is no explanation why there are several multiplicators FMU/IO etc…
One example of the Values displayed shortly before going back to 0:
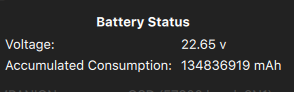
Since both of us reported the same, it´s obviously a bug and has nothing to do with your settings.You don´t need accumulated values anyways. 
Thanks for reporting! I will check what’s going on with Pixracer on current.
IMHO the the reading was juming around already in 1.2 but not at such high values.
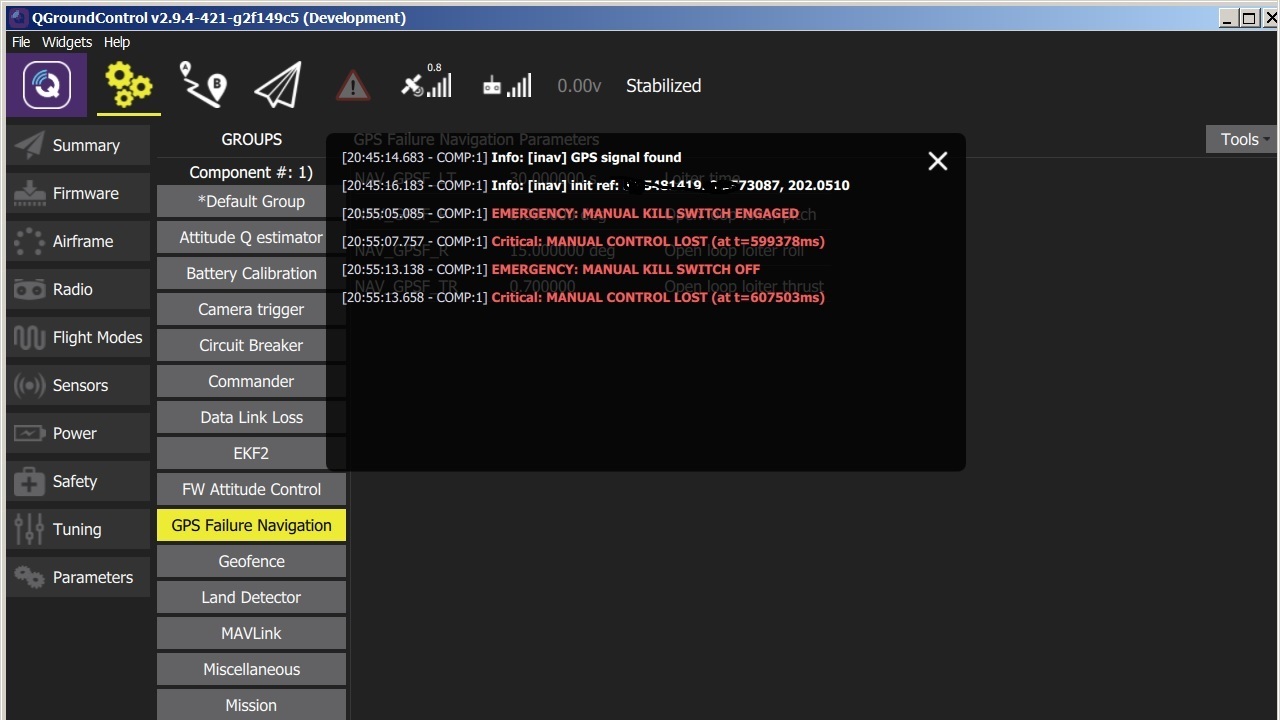
I think I found a bug in the 1.3 beta or it may be in QGC. I had the telemetry failsafe on under safety but in the summary section is says disabled.
The other issue i just noticed is that I am having telemetry drop out when the battery gets below 20%. I am using an RFD900 in low latency mode.
So you´re lucky, that FS has been disabled.
When GCS/Telemetry FS came up on default @ APM,which I sadly didn´t notice, I experienced one of my most expensive crashes, so I turn it off, if I´m able to. Call it a trap : Can´t image RTL if connection lost appears (which is not unsual for me)
We need a Failsafe config page for PX4 where we´re able to do so and have the choice to fix either RTL or LAND or Do Nothing action. Until this is the case, I can´t do safe testflights within urban environments.
1 Like
That config page is there. If you don’t check any of the options t will do nothing by default.
Sorry, I didn´t find it. I´ve got only this page:
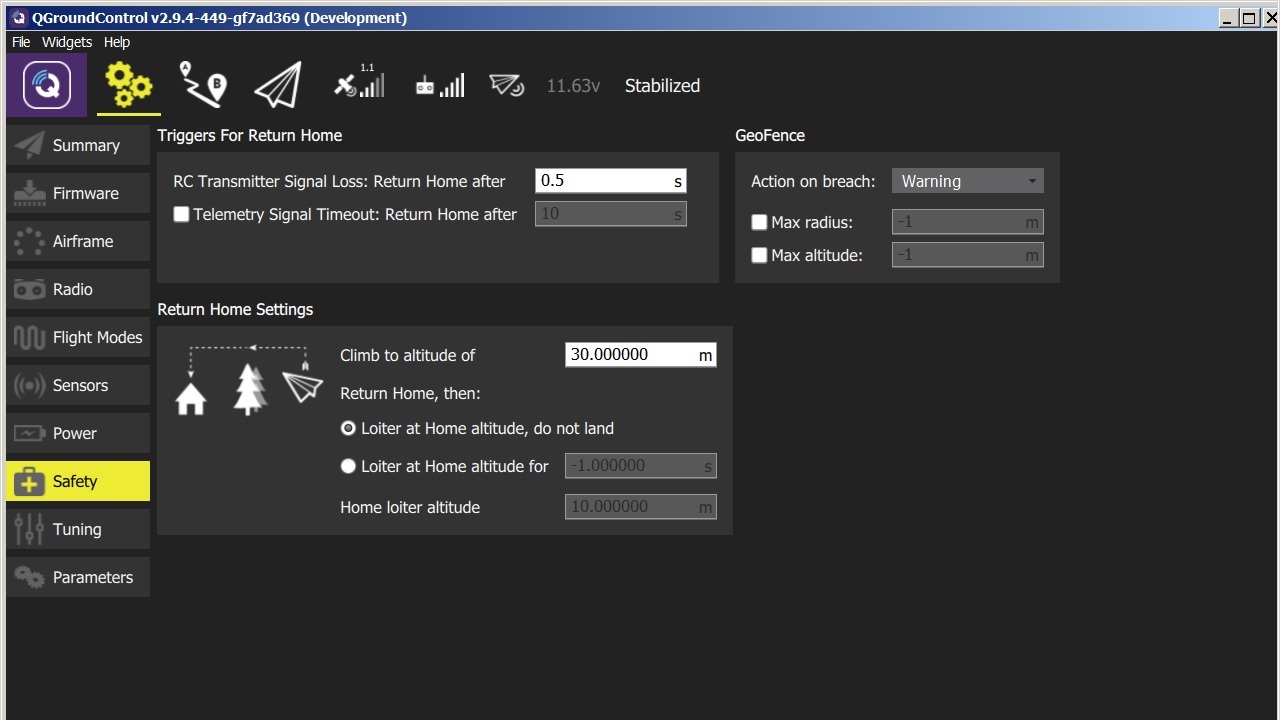
where I´m only able to uncheck Telemetry Signal timeout (Is this a loss, and how long ?), but I can´t disable RTL or change it to LAND.
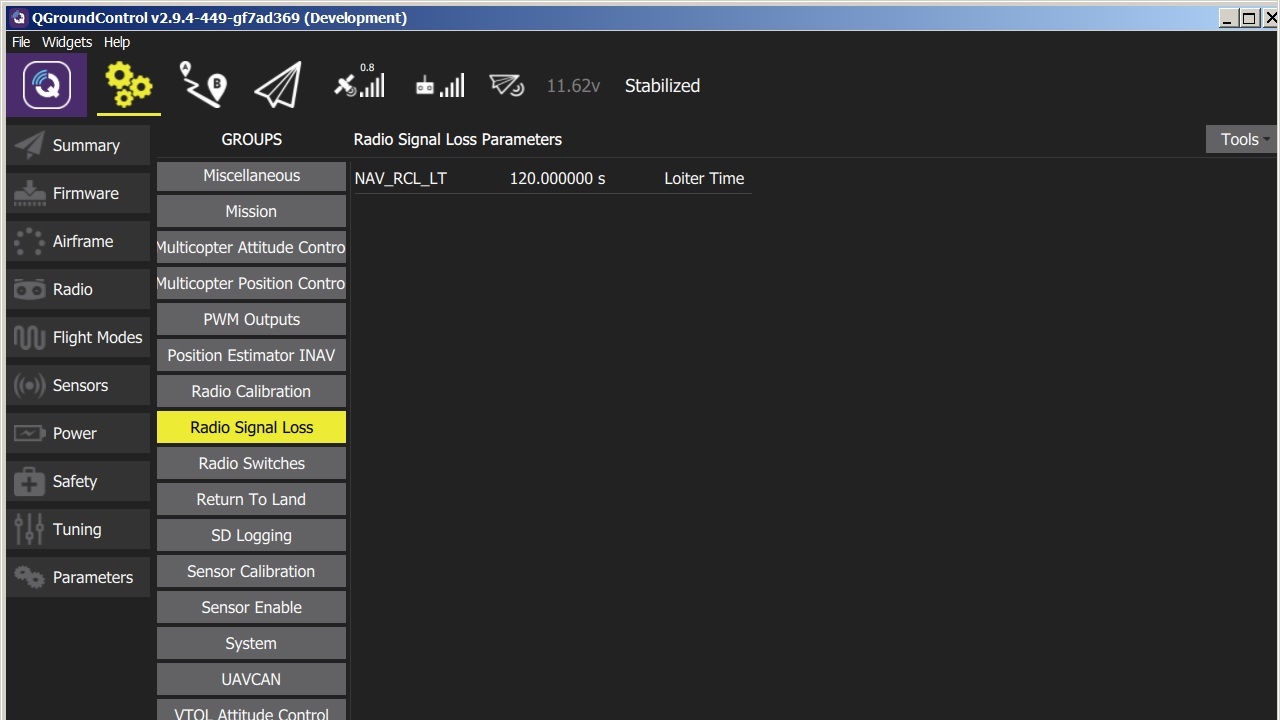
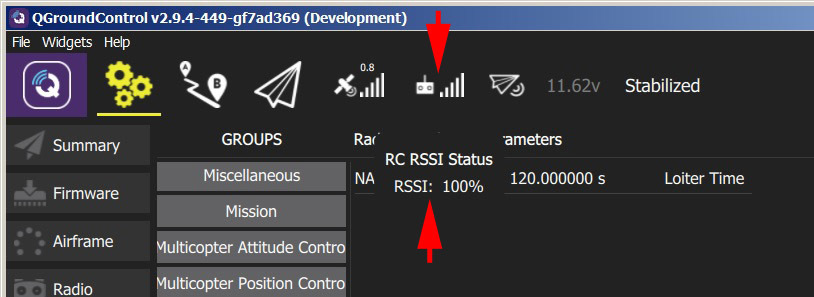
Under Radio Signal Loss, I only find a Loiter time parameter.
Thats where simple users like me would expect some further action adjustments. I understand that this might not be of any importance for plane users.
Regarding Radio Signal Loss. I almost forgot: RSSI status shows a 100% even if the Tx is turned off.
Q: Is this related to Rx only ?
{kind=link}
This is of importance to plane user having the options you are discussing. Having the plane return home and land on RC signal loss is a much better option than loiter and terminate flight. More options for telemetry failsafe would be much better as well.
I fixed the Pixracer current (I think), please try master. I also added land and “do nothing” for RC and data link loss. Its not yet on master but on this PR: https://github.com/PX4/Firmware/pull/4344
Awesome. I will make sure to test all of this including the throttle disarm when it makes it to beta. Hopefully these features can make the cut for the 1.3 release.
Hi Lorenz,
sorry but Power Consumption is still erratic on Pixracer and AUAV-X2. Now the Values jump between 0, 255 and some really large number (see Screenshot).

Value shows also up in Mavlink Inspector. 1.2 and earlier often shows -1 and some strange number. Never had anything useful there.