Hi all,
I’ve noticed what appears to be a desired position bias when entering land mode during flight that I cannot explain. The following is a previous flight where I experienced this behavior:
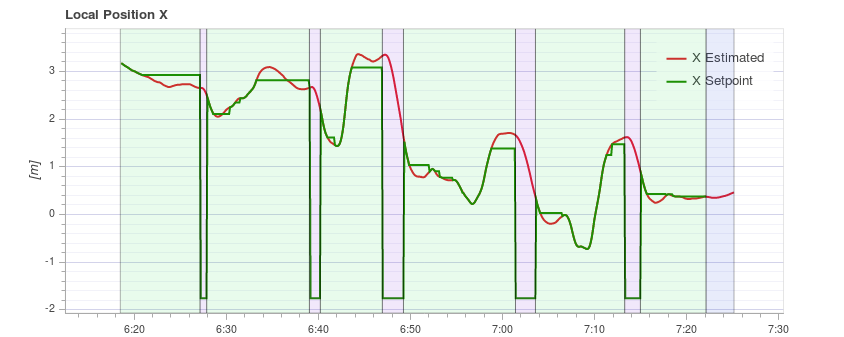
As you can see by the Position X plot above, when I switch from Position (green) to Land (purple), the position clamps to, what seems like, an arbitrary bias. I was able to repeat this behavior in a subsequent flight:
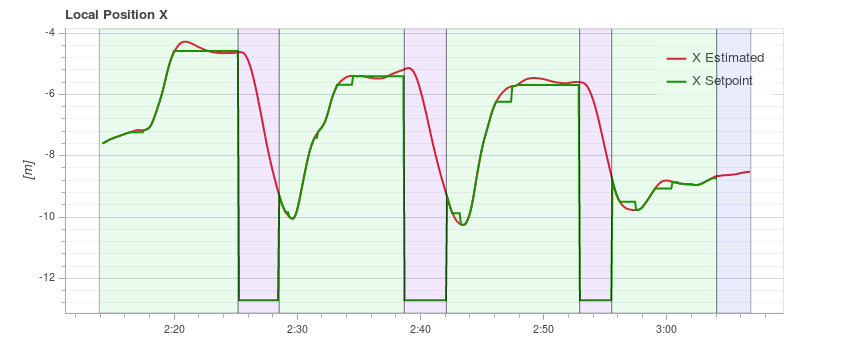
This seemingly arbitrary offset is also found in the Y axis. Here are links the two flights’ logs: Land Bias Flight 1 Land Bias Flight 2.
More notes on the flight tests:
- Both flights tests were completed after power cycles
- This behavior is occurring about 1 out of 4 times I power cycle
- I am currently branched off of v1.6.5 my branch has minor mavlink additions unrelated to the commander source.
Has anyone experienced behavior like this before? Any tips on how to replicate this behavior regularly?
