Hi, everyone!I recently studied the vertical take-off and landing fixed-wing model, which USES pixhawk flight control, and the ground station is QGroundControl.
4 four rotor and surfers fixed-wing fit has been installed, the aircraft power supply, the first four rotor test, unlock only two OARS in turn push the throttle motor, and it is diagonal, I think that is the problem of yaw, remote control rocker yaw to the left, the motor will turn in two, is diagonal.The back of the rocker is still.
What’s the matter with you?
If you can also post your original Chinese text under the English text perhaps i can help to make it more understandable.
大家好!我最近在研究垂直起降固定翼模型,用的是pixhawk飞控,地面站是QGroundControl。
4四旋翼和冲浪者固定翼的合体已经装好,飞机供电,先测试四旋翼起飞,解锁推油门电机只有2个桨在转,而且是对角,我认为是偏航的问题,遥控器摇杆偏航打到最左,电机就会换两个在转,是对角。摇杆回中飞机依旧。
请问大家这是怎么回事?
What are you talking about?
OK then in brief your question is:
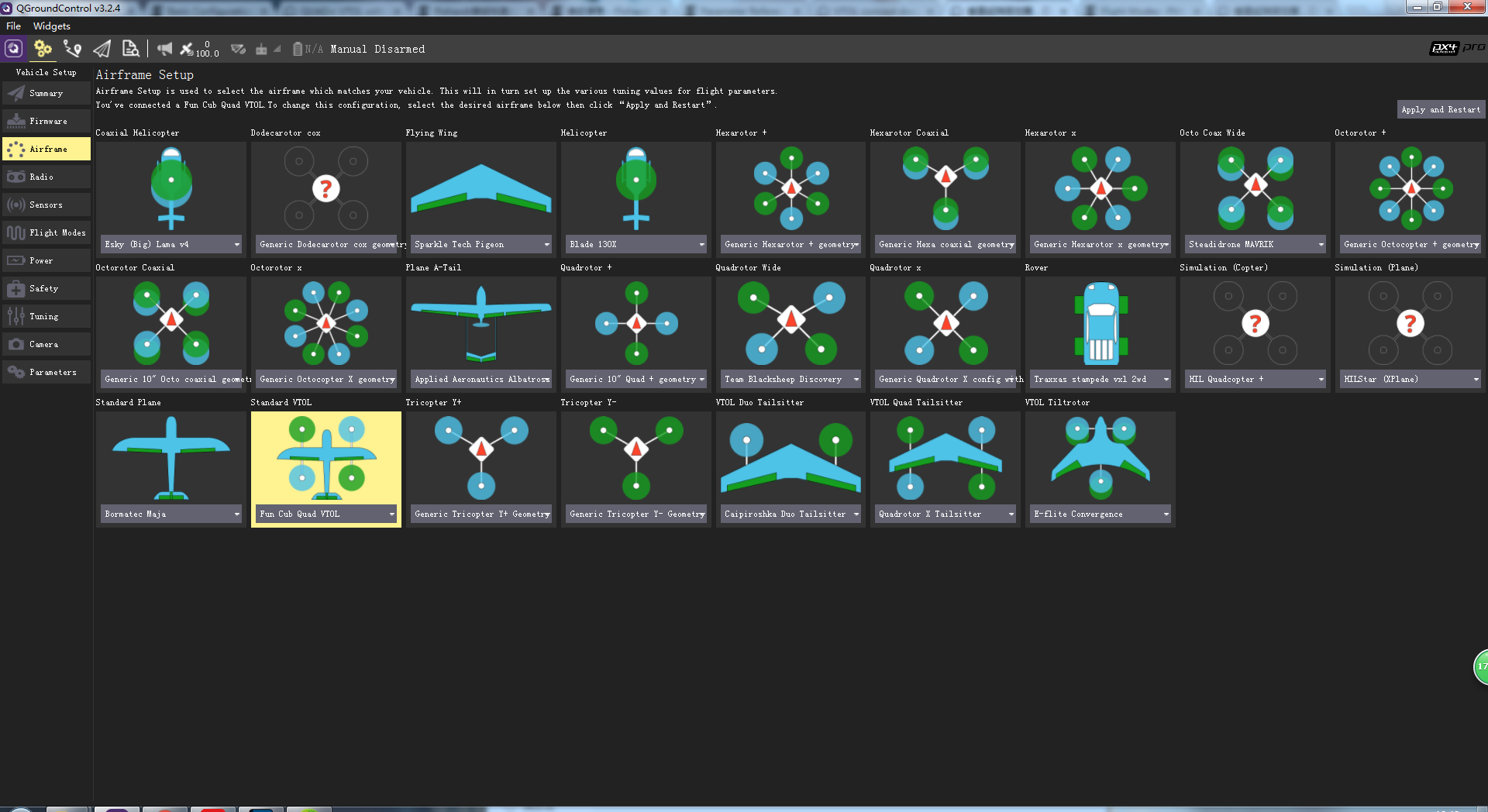
You have assembled 4-rotors on a Surfer fixed wing frame,
When take off only 2 rotors in diagonal are spinning when raise throttle, and when pull yaw to maximum left position another 2 rotors will start spinning.
Seems to me that you did not calibrate ESCs.
Perhaps @dagar can give more expertised opinion.
我也是这样认为的。但是,每一个ESC我都单个校准过了,我之所以这样校准,是因为我没有找到一起校准ESC的办法。pixhawk飞控 您有什么办法吗?
There is a ‘Calibrate’ button under ‘Power’ tab in QGC.
然后呢?这个按钮代表着什么?自动校准吗?
Yes, try it and follow the prompts on screen, and see if that fix your problem.
按照地面站提示,我试过了,但是很不理想。
地面站提示是先用USB连接飞控,然后点击“Calibrate”按钮,然后提示说接上电源就可以开始校准了,然而我就卡在了这里,接上电源没有反应。这是为什么呢?
Probably your ESC is not supported, or this ‘Calibrate’ does not work on Pixhawk? (not quite sure about it as i did not verify this on a Pixhawk before)
What type of frame you select in QGC airframe setup?

Are you sure that your ESC and motor can be driven by a 1S (3.7V) battery?
I’m sure.Because my previous quadrotors were all used in this kind of battery, and they flew perfectly.
用接收机校准一下看看,我试过没有问题的:grinning: