I’m installing a PIXHAWK4 MIN with Firmware version 1.9Beta.
I was using the firmware 1.9 because implemented hardware is not fully compatible with the 1.8 firmware (mainly regarding the GPS antenna).
Sorry, I’m going crazy with a really strange behaviour with the throttle.
It seems that the system in Altitude the PIXHAWK4 ignore the throttle when the stick position is less than a threshold (more or less 75%). You can directly check it in Flight review:
https://logs.px4.io/plot_app?log=d29ca377-61e3-42f2-8628-a265cc935f32
Compare the graph “manual control inputs” (throttle line) with “Actuator controls”.

I’m not evidencing this behaviour in the Stabilized mode. The throttle is working fine but I have a strange YAW problem. It seems the system continuously increases the yaw! You can directly check it in Flight review:
https://logs.px4.io/plot_app?log=1f9e1f64-daf9-4dd4-adc9-4cb4807140f0
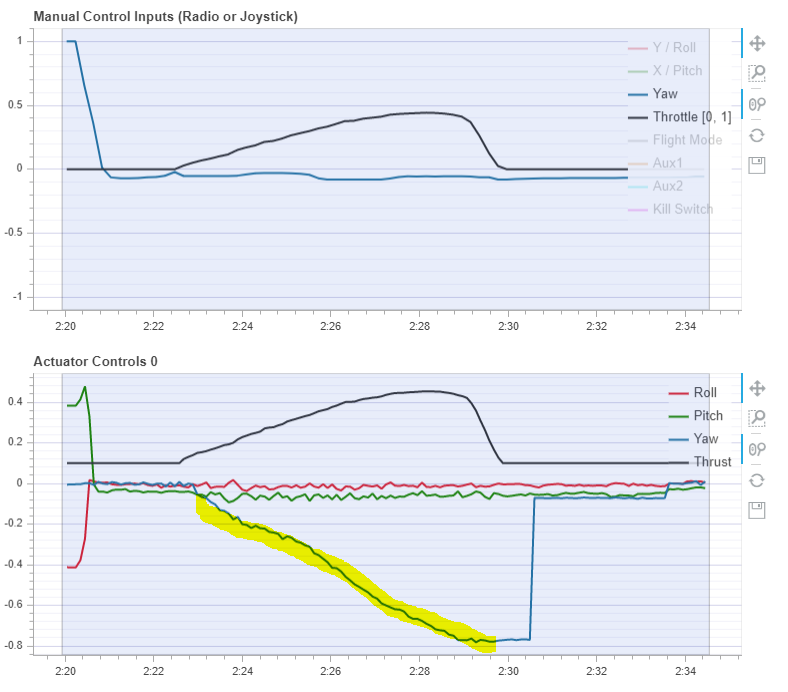
Compare the graph “manual control inputs” (yaw line) with “Actuator controls”.
Can anybody help me with this?
Thanks