Hi all,
I am looking for an ROS enabled open source quadrotor to test my control algorithms on.
I think the ardupilot flight controller is the best choice as it is completely open source and well established.
I have been looking over the web for solutions and I came across two:
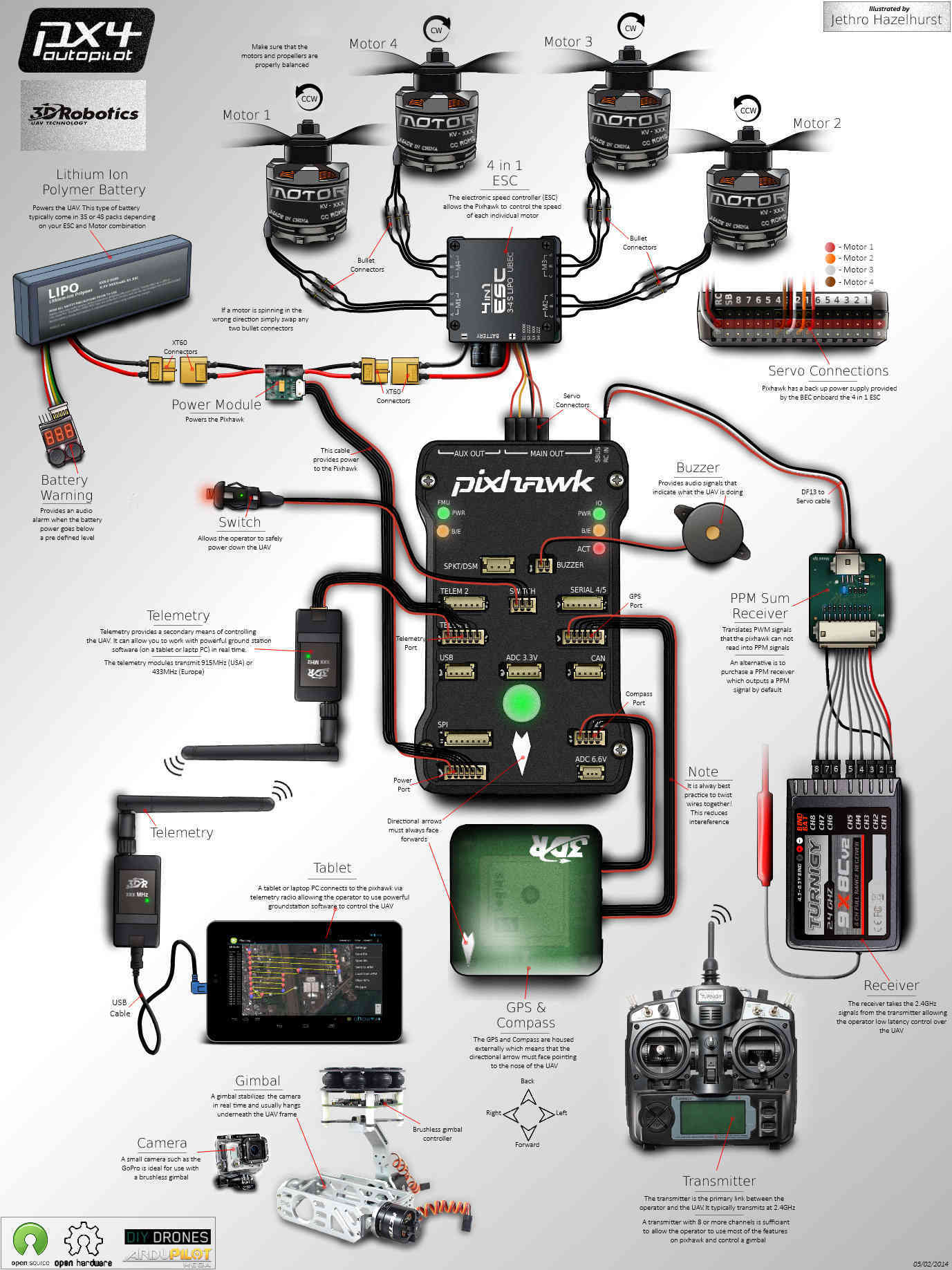
Please see the following diagram, can any tell me the product names, e.g. what motors are those shown, and what frame I will need to make a quadrotor based on ardupilot?
I also found in the following link: pixhawk2 | Pixhawk another quadrotor with the ardupilot but I also do not know what components have they used.
If anyone can tell me a possible “recipe” that I can put together to build a quadrotor (easily) running ardupilot it will be great.
Thanks!!