Hi everyone, I’m having difficulty analysing the px4log by flightplot.
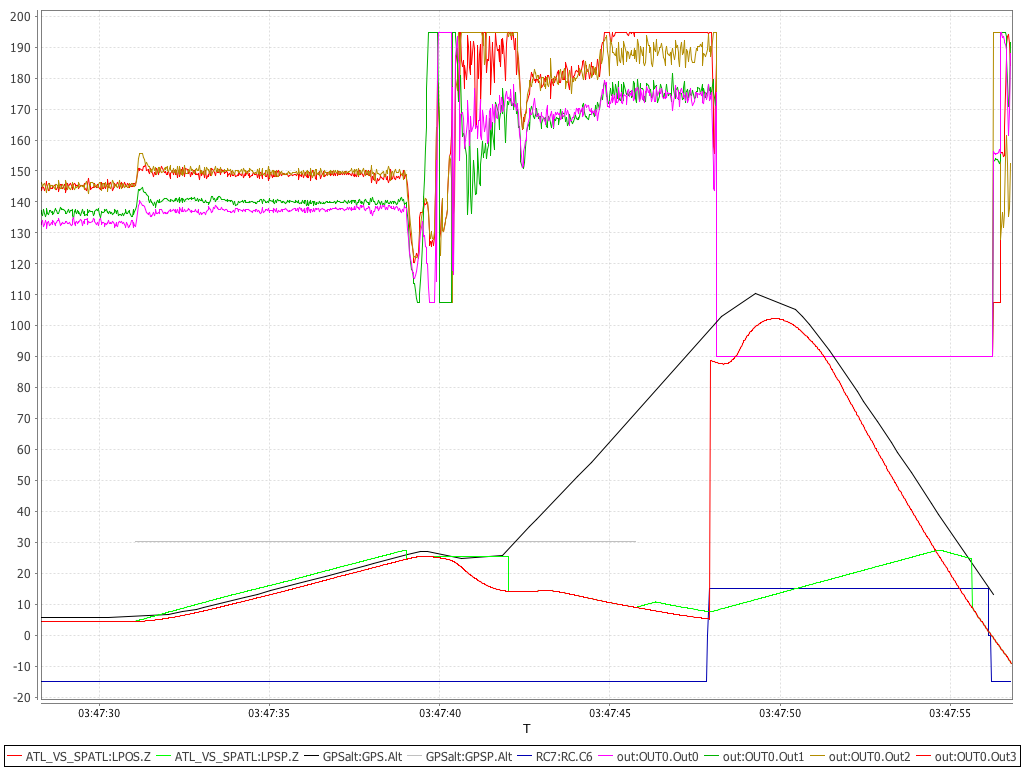
when the quad rotor is in Position mode. i triggered RTL mode(RC7), the rotor is rising up quickly, when the altitude is almost 30m, I changed back to Position mode, but the rotor continued to rise. so I trigger the kill mode. the rotor is falling down.
I found that estimated altitude LPOS.Z is deviating from GPSalt. but when I triggered kill mode, the estimated altitude instantly went to the GPSalt. it is so strange, i don’t know the reason.
another question, i can’t plot the BAROalt and BAROpressure even BAROtmp, Is the system did not use the pressure altitude?
can anyone help?