Where can I set my throttle mid point?
I tried with rc3_trim but this absolutely wrong. My 5" RaceBlade has a 4s Lipo and if I have my throttle at mid position it wil climb very fast. How do I change that?
Thanks 
There is a PR pending to add a parameter for hover throttle: https://github.com/PX4/Firmware/pull/3418
Hi,
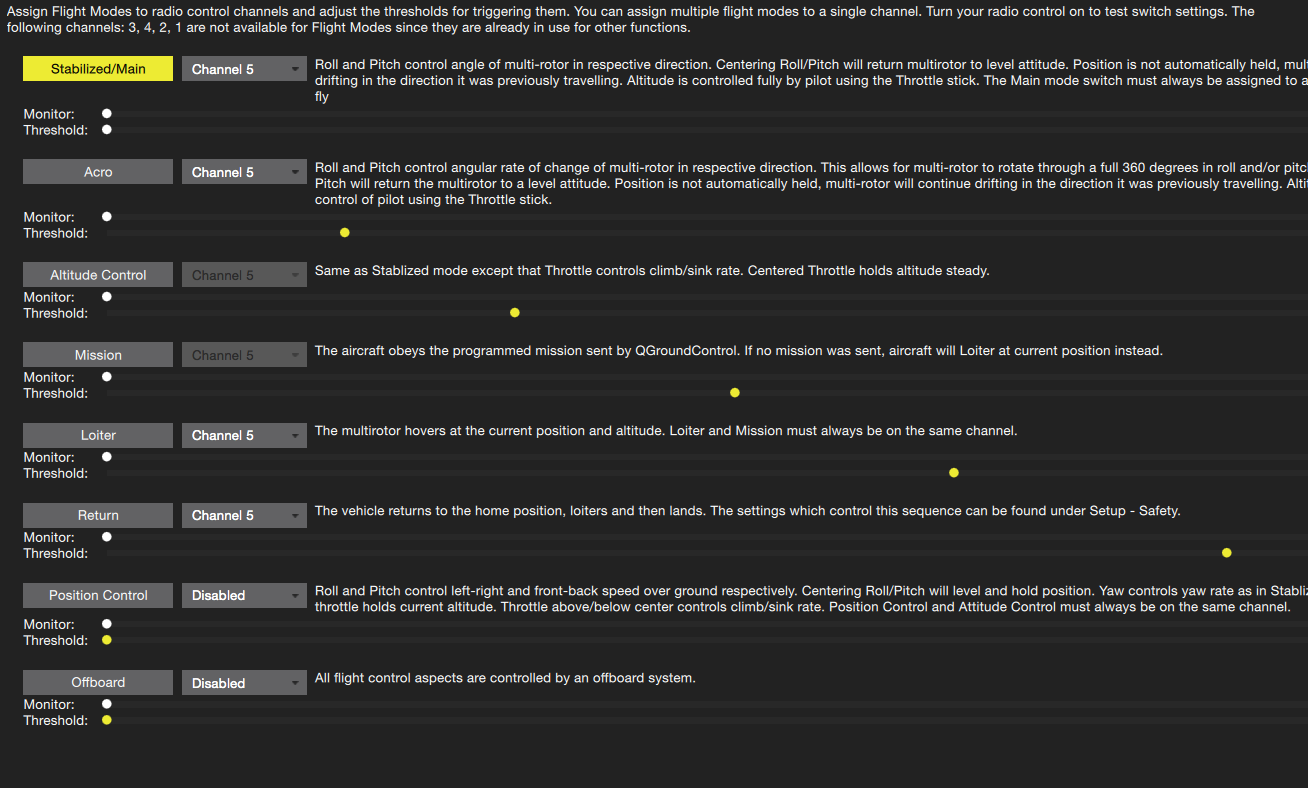
In qgc on the top menu bar I can choose between different flight modes. But I can’t assign rattitude or manual to my RC. Why?
I don’t understand that. Thanks for the help
Das passt gut zu dem ungelöstem Problem Flight Mode assignment.
We´ve got a german thread where some users aren´t getting along with Flight Mode assignment as well. Its not QGC but PX4 stack related. Its easy to assign Flight modes with QGC/APM stack (even better optics than MP)
I found my next question 
How can I set the failsafe from RTL to motor stop?
My racer has no gps but the failsaife is still on RTL/Land setup.
I did not finde much in the parameters so a bit help wouldbe great.
Thank you
Though it’s not clear from QGC, I believe without a GPS fix, RTL becomes “Flight Termination” which stops the motors
I made a test without propellers and if I switch off my taranis the flight mode change to land. I would like that the motors immediately stop turning and that my pixracer fall like a rock.
Any ideas?
I’m not very familiar with that part of the PX4 code. Hopefully someone on the core team will chime in here.
My “old” apm copter just got a new heart today, the new px4 firmware on my auav-x2.
I couldn’t calibrate my esc’s. Why?
I disabled the safety switch CBRK_IO_SAFETY, the powermodule CBRK_SUPPLY_CHK and the usb CBRK_USB_CHK but I still get a battery timeout when I want to calibrate the esc’s.
I use the lstest qgc and px4 firmware master.
Is this a regression? It’s been a long time since I calibrated any ESCs on FMUv2.
Calibrating esc on the pixracer with qgc and px4 was no problem. Calibrating esc on the AUAV-X2 with qgc and px4 did not work. There are not the same esc. The copter is flying fine, so no problem there.
I maid this step automatically, becaus in my opinion every new setup should have a esc calibration.
Maybe not every esc needs a calibration.

Yes. You can do that today yourself and it will be in the AppStore shortly.
QGC can be installed on iPhone can be installed on the iPhone but it should be above the iPhone 5s and how to install it you can know from the Safari can’t Establish a Secure Connection
I downloaded ground control 3.4.4 what is the newest firmware and software for ground control
which mission planner software is compatible with the mission control