Hi everyone 
Since a few days I block on a problem.
My hexa flight is very good manual or stabilize but I put in Hold, impossible to arm the engines.
The gps is well connected, I have a fixed signal and my autopilot flashes: armed and signal gps lock.
I don’t understand… 
Etienne
I have something about logfile :
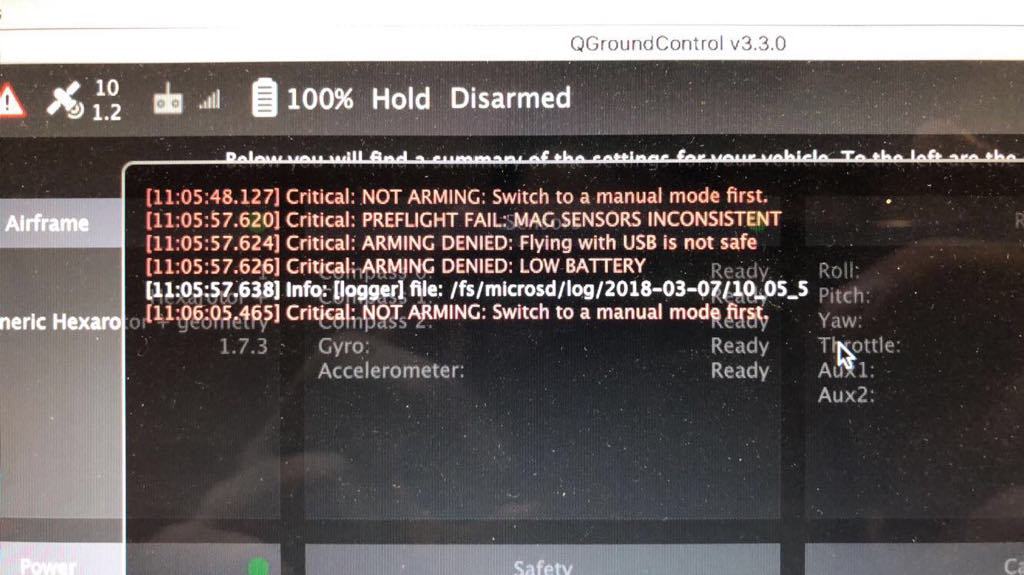
When I arm my motors in hold flight mode : “Switch to a manual mode first”.
Yes, you need to get the logfile from either the SD card of the autopilot or download it using QGC
https://docs.px4.io/en/flying/flight_reporting.html
Why do you want to arm in hold flight mode? Maybe you actually want to use position flight mode?
Yes actually it works in position but I must have a porbème with my GPS, drone is very aggressive and is not at all stable