I have used 4 different escs for motors ,ppm encoder is connected to convert into one signal to pixhawk it doesn’t work but when escs are directly connected to pixhawk they rotate on different channels. I want to rotate each motor which one single channel using ppm encoder .
I think that’s not something that Pixhawk does out of the box because it’s not a typical use case. So it’s possible but will require some more work and learning of how it all works.
If you just want to connect RC channels directly to ESCs, why don’t you connect the ECSs directly to the RC receiver (without Pixhawk, without PPM encoder)?
Also, if you share some more context on what you’re trying to do and what your setup looks like that might enable us to help you.
1 Like
Without the connection of ppm the motors work individually on different channels. When operated they work on different channels so using ppm i want all motors work together like if throttle is moved above all motors should get same signal.
Again, what are you trying to do? What is this for? I still don’t think I actually understand.
Pixhawk is used as flight controller now what happens is when ppm is connected to receiver the motors aren’t working but when connected directly to the receiver motors are working but in transmitter the channel for each motor is different which means if channel 3 is connected to motor 1 then motor one will only move up down rest all motors won’t work so ppm is used so that when i move channel 3 up all the motors move upwards . This is not happening when ppm encoder is connected .
And have you actually set up the flight controller, and armed, etc?
Yes already armed !!
Ok, in that case I don’t know and would need setup description, photos, logs, etc.



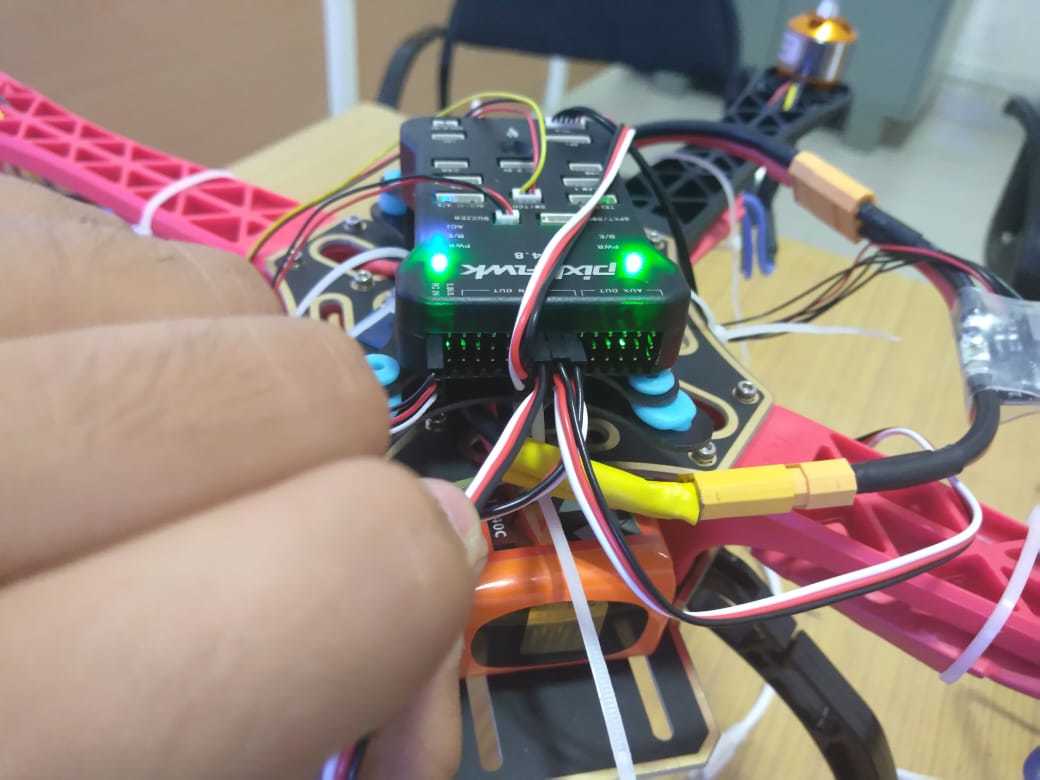


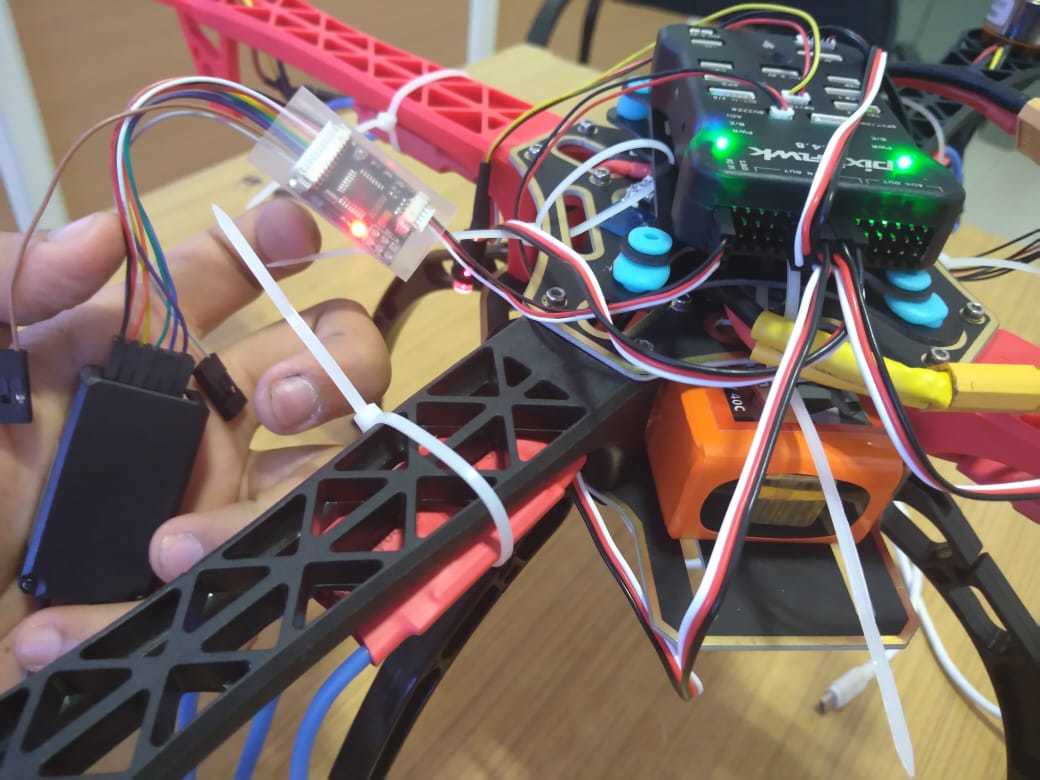
These are the images of my pixhawk connection with ppm and receiver. I followed the below attached pixhawk connection for my drone

1 Like
Hm, I can’t spot something wrong. And you have calibrated RC in QGC? And done all calibrations? And were able to arm without error messages?
Yess calibrated twice actually , still can you share any link for calibrating piwhawk using mission planner ? And even after calibrating all motors aren’t working together on same channel .
If you’re using Mission Planner, you’re using ArduPilot and not PX4 and I recommend you ask int he ArduPilot forums.
Hi I am also facing a same issue.I am using flysky fs i6b reciever. The ppm encorder is v1. Also I am using px4 firmware.
I am not able to calibrate the radio control.
Do you see any RC values in QGC?
I’m having the exact same problem. Plugging a PPM encoder into the PPM R/C input on the Pixhawk is not working. Although PX4 recognizes the RC channels, the radio cannot be calibrated. BTW, the reason I’m doing this is because my RC receiver cannot use the DSM/RC input. Its an 8 ch Spektrum Rx that has no provision for DSM input.
What I see in QGC’s radio calibration is that the channel markers randomly jump back and forth. When I start the calibration, it only does the first stick (throttle) and then crashes. The jumping back and forth is an indication that the Pixhawk is not getting the proper code to set the PWM signals to their proper values. I think there may be some issue with how PX4 picks up the PPM signal. Or maybe my five PPM encoders are bad, but that seems unlikely.
Any further info on this?
Joe