Unfortunately not for a day or two, but the guys above published logs and videos.
Ok, so Mark worked out that a fix for the accel sensor on the Pixracer slipped through and did not get back-ported to stable.
That means the flight performance on master was good but not in the release. I’ve addressed this now and released 1.4.3, which also includes a fix for the USB connectivity (much more stable / quick). Please try this by either flashing through QGroundControl or the binary right away:
Thank you Lorenz! I’ll try it a little later today and report back.
No, I’m afraid the problem remains for me. The motors still surge in little bursts, and the craft twitches left and right every few seconds. I calibrated the accelerometer, but not the other sensors, and softened the PosHold slider one notch. The firmware version is showing 1.4.1dev in the status window. Is that correct?
Hi Guys, I can probably check this on my F450 with Pixracer this weekend (haven’t been flying it for a while).
@zs6buj The version sounds incorrect. You should be getting 1.4.3 if you flash stable / the default setting.

Nope. See pics.
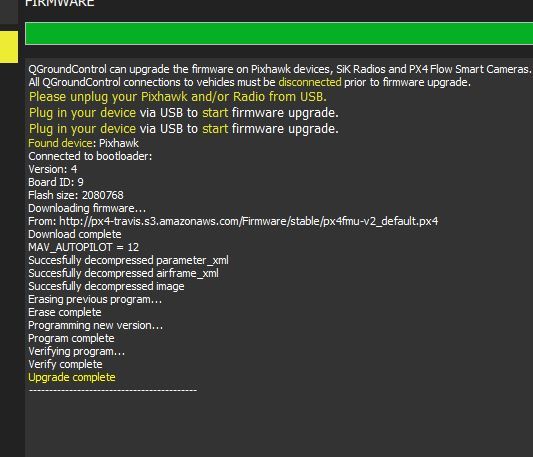
Sorry, should have show the completed flash process like this.
@zs6buj Can you upload a log file to http://logs.uaventure.com? Without that its not really possible to offer further assistance. We’ve resolved a number of the issues originally raised here, so I need a flight log with the version you flashed for further analysis.
And one more thing: I would also greatly appreciate if you could try the beta version. Its possible that it shows a significantly better flight performance and that it makes more sense to create a new release quickly.
http://logs.uaventure.com/view/g6ioK8BdXWsQm9QJ5baxDP
Ok, I’ll try the beta version shortly. You didn’t comment on the fact that the summary window still shows firmware v1.4.1dev AFTER flashing the latest stable?
I see there is a v1.4.4 there now.
Sorry, forgot to mention that the wrong version indication is an interface issue between Github and QGC. Thanks for raising that and we are on route in addressing it.
Ok, after a first glance on the log file: Your airframe has a very high vibration level:
http://logs.uaventure.com/view/g6ioK8BdXWsQm9QJ5baxDP#IMU_Acc_PLOT
It would be good to see if it stays at that level when you flash and use beta. If it does then what needs to be fixed is your mechanical mounting of the autopilot.
What changed between 1.3 and 1.4 is that we are now using an estimator with significantly better accuracy, but it requires a properly designed airframe. So its not surprising that some users have now issues, but the only way to improve the overall flight performance of the system is to have the whole system set up properly - including the autopilot mounting.
Thank you for the diagnosis Lorenz. The Pixhawk is mounted on soft foam, but clearly not enough then  Here is the log from a short flight using the Beta firmware as requested. The surging symptoms are more or less the same.
Here is the log from a short flight using the Beta firmware as requested. The surging symptoms are more or less the same.
http://logs.uaventure.com/view/F9ZSxxVjH5SHNt2mMBRzwc
LogMuncher is new to me, having used the APM stack up to now. Very nice.
Thanks again for the help.
Hi Guys I was flying (mostly some Acro) with my F450 and Pixracer running Master from today. Any interesst in Logs? To be honest I got a bit high levels of vibration despite using a NAZE Antivibration Mount… May be induced due to some pretty old props with a few crashes and dirt 
I also find it pretty hard to properly mount such a light FC with quiet a lot cables attached.
@Andreas_Hoffmann Yes, the logs would be fantastic. And you’re right regarding the board. The heavy aluminum case that HobbyKing sells helps there though.
POSCTL test on Pixracer R7 running latest master. Turned down some MPC gains and position hold is fairly good, still a bit erratic on altitude control though. Also a bit twitchy when moving the right stick off center.
http://logs.px4.io/plot_app?log=77875b47-2ffc-4a60-b04c-aa8d6c3c35c5
thanks for your replying and i greatly appreciate if you can help me to solve the problem . this
is the video https://www.youtube.com/watch?v=b5hl9FOcodE
My pixracer cannot enter altitude control mode using LPE. Any ideas? I do not use GPS or px4flow.
@doctorluhang If you want altitude control without GPS you need to flash latest master where this has been resolved.