Just started flying a Vortex 250 Pro (by Horizon/ImmersionRC) from the LHS. Very slick package and the OSD works great. And I’m pleased to say that ACRO mode (with the default tuning) feels the same as my Spedix250AQ/PixRacer. This reinforces my opinion( formed by flying the S250AQ with both CleanFlight/Naze32 and PX4) that PixRacer/PX4 has what it takes for FPV racers.
I assume the “extreme” Vortex Pro tunings just crank up the stick sensitivity… anybody listening who knows the difference?
Please someone help…I tried to flash pixracer with px4 using qgc but could not get radio to calibrate. My understanding is I should be using a specific download of QGC and a specific px4 fw. Could someone link me to each specific one that works to date. I have been trying various SW and FW and run into one dead end or another…being it radio, software, fw or esc problems. I have followed painless 360 videos but do not get same results. I was able to get Mission planner to flash PX4 master but can not get esc’s to calibrate. I dont get the calibration startup tones. That’s following videos and on screen instructions. Im about ready to sell this board. Pleased with quality but disappointed in lack of documentations specific to this FC. Very hard for someone who has never set one up comming from Cleanflight world…Shame for price paid.
Pixracer V1 rc14
Aikon boltlite 30a
Sunny Sky 2206 2000
Taranis plus 2.1.8
X4r sbus
Can you please download QGC from here:
Then flash the latest BETA of the PX4 flight stack (while flashing, tick the advanced check box, then pick beta). Re-do the airframe setup. Let us know what you end up with.
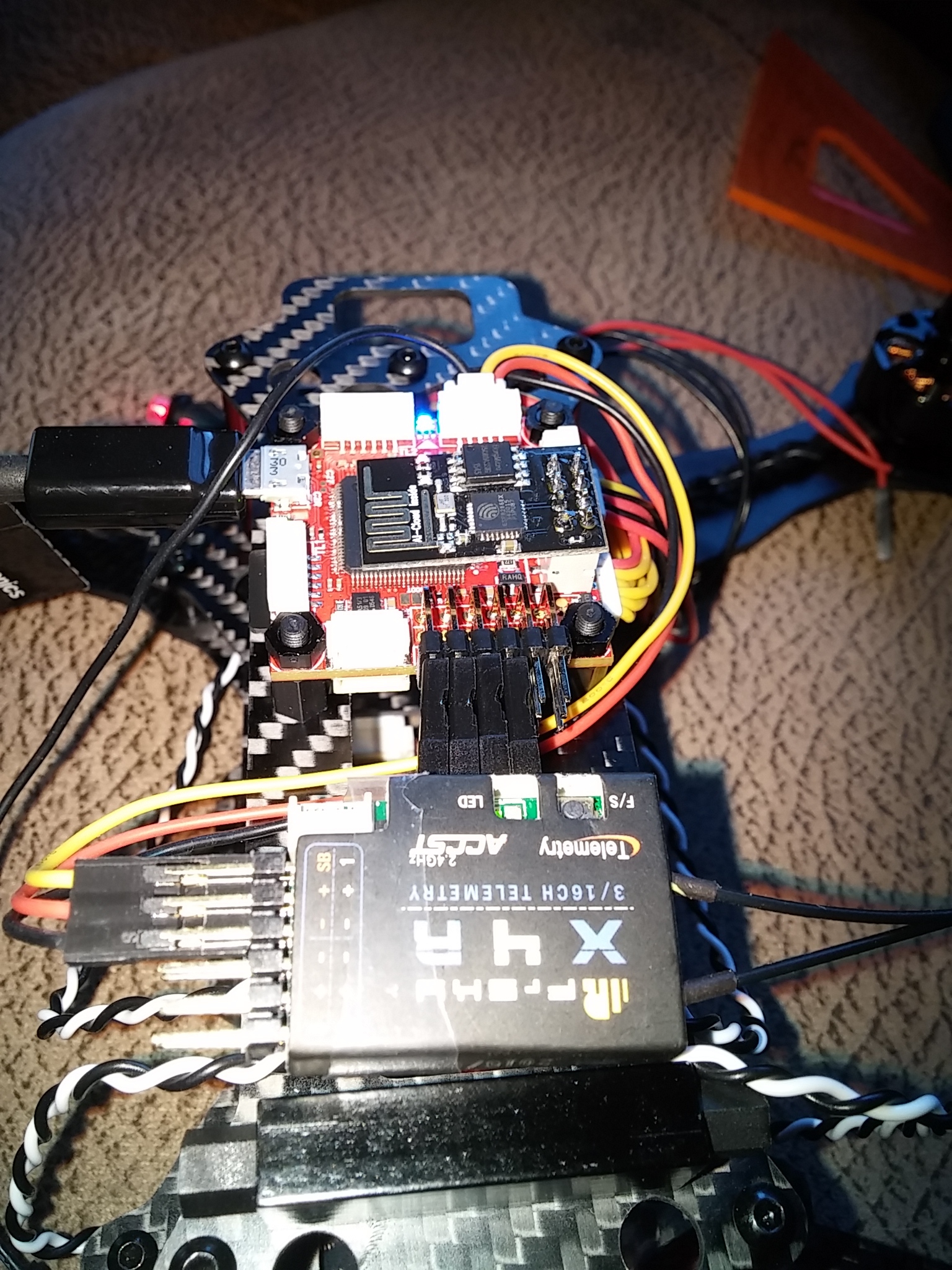
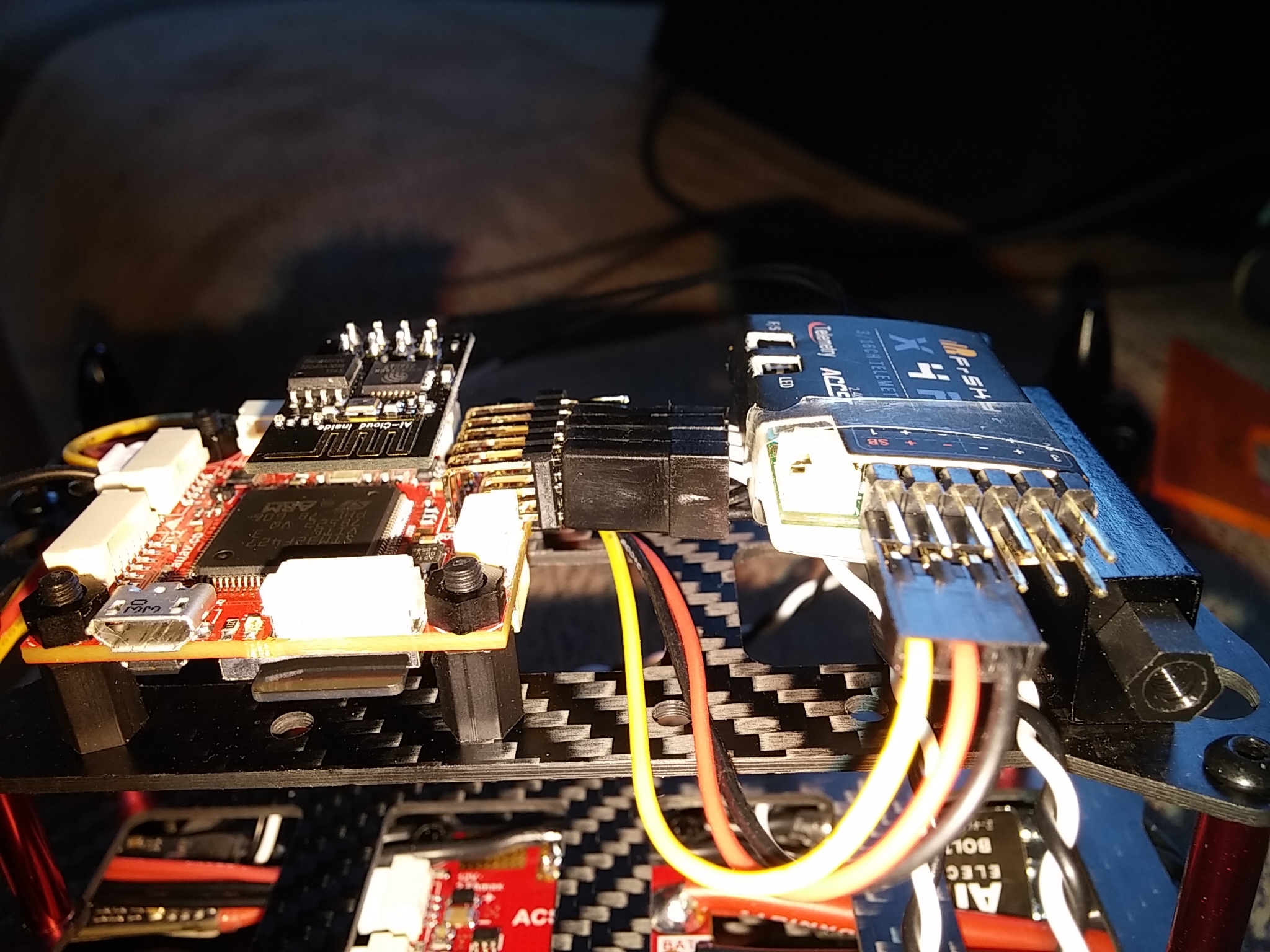
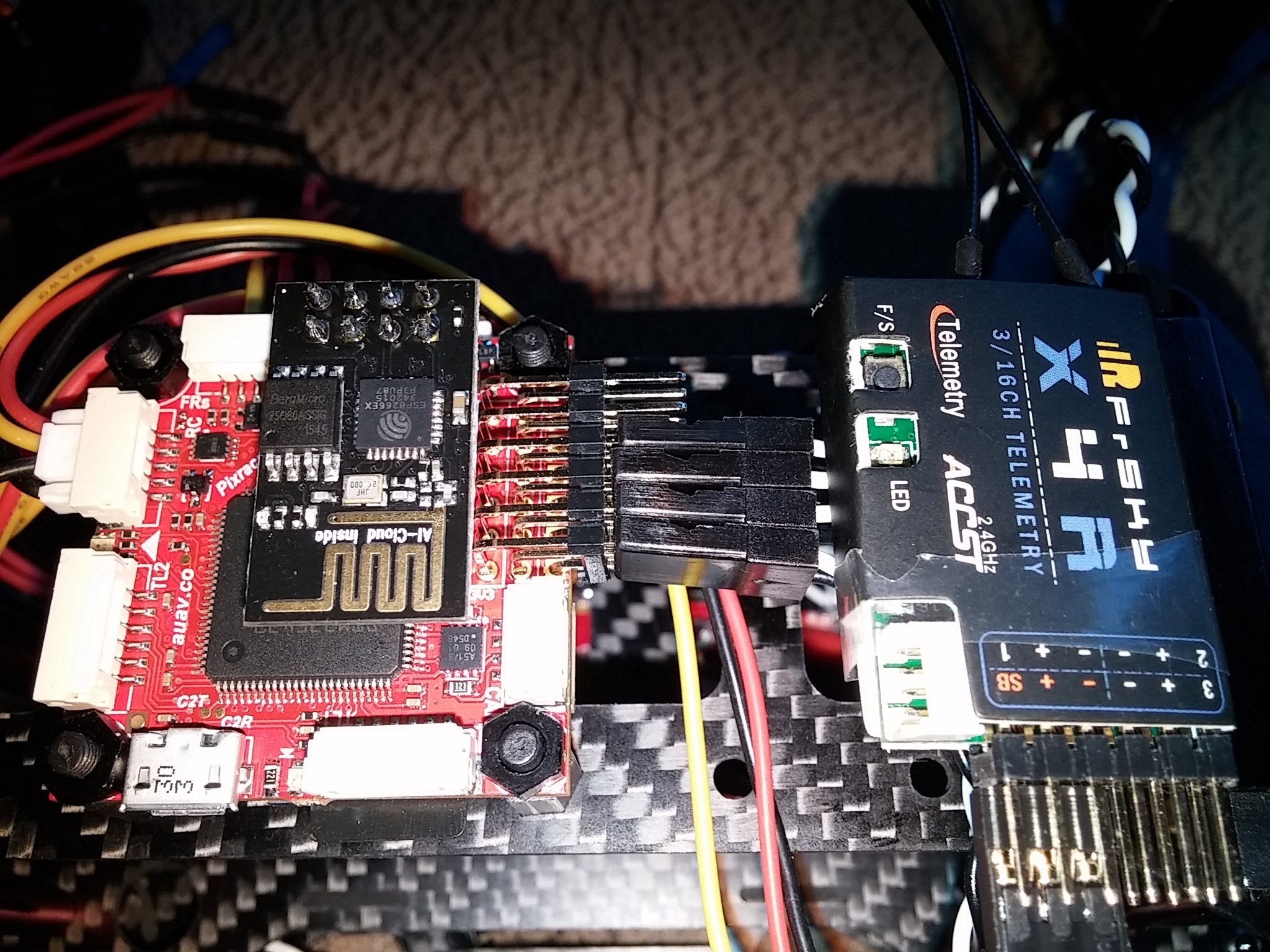
Charger, I use the X4R-SB myself. Can you post a picture of how you have it connected?
Thanks,
Phil
Is anyone here using KISS ESCs? I set PWM_IDLE/PWM_MIN/PWM_MAX to 100/125/250 with the KISS ESCs in Oneshot125 mode. While disarmed the blue leds glow. When arming, the motors spin up to maximum speed for about 1 sec and then they stop and the ESCs even turn off the leds. Only with disarming they will start glowing again.
I’m using the currect beta fw.
Radio calibration was successful…but sorry…sensor calibration is asking for air speed sensor now…is there a way to turn that off?..I chose Lumenier QAV250 for frame type
SW: QGC 2.9.5
FW: PX4 beta
Can you reboot and check if it still asks for airspeed?
Lorenz
Thank you for your help. That did it. I have managed to make it through all necessary steps I do believe. Not sure about esc calibration. There were no tones from the motors to verify esc’s calibrated and it didn’t have me do any stick movements? Is this correct? When I lower the throttle I have one motor that shudders like its not off all the way.
Also, where do I go to learn about the various flight modes for QGC? What they are/mean and how to set them up?
Can I ask what was the resolution for the RC not being detected?
The QGC SW and PX4 FW versions Lorenz recommended in his answer to my question resolved that issue for me.
I am also having a hard time getting my radio to be recognized (using graupner sumd). I tried the beta firmware as suggested but didn’t have any luck and also found that I couldn’t get into nsh over usb. After going back to the master firmware I can now get in to nsh using mission planner but I am getting a “command not found” error when trying to do “px4io status”. If I’m not mistaken px4io status can be used to debug radio issues.
Side note: The “No SD card” buzzer tone was garbled in the beta firmware.
You need to flash via QGroundControl, not mission planner. Are you confident that you have configured your receiver correctly? All users having issues with Graupner hardware so far had their receivers configured incorrectly.
If you think its set up correctly, could you share the steps you performed to configure it and a photograph of your transmitter with the settings?
Thank you for the response. I am using qgc to flash and for configuration, I’m just using mission planner for the terminal functionality. The main thing I’m wondering about is how to use nsh to debug the hardware. I read in multiple places online that you can use “px4io status” but from what I’ve seen “px4io” “status” and “px4io status” are all not recognized as commands.
Hi All
I was looking for a smaller flight controller for my new custom build that will not fit a Pixhawk. A friend saw Pixracer, and I was happy it was available !! Pretty cool to have a board with the name of the developer on the box it comes in !! Thanks Phillip !! To all the developers and people involved in producing Pixracer, PX4, Ardupilot THANKS !!!
So I have loaded it using the instructions on RC Groups with QGC and PX4 daily build about a week ago. I test flew the past few days. Set up and configuring was awesome !! I had no major hangups Wifi is working and flight is OK.
I have’nt seen how it goes if i use MP with PX4. But a few things about QGC that I need different
-
I don’t want the props to spin at arming.
-
GPS lock before arming
-
PID tuning from a knob on Tx. I don’t have a sexy little tab or Ph. to hook up for quick QGC link
Karl
Glad you like it!
Don’t try that, you will kill your config. MP is not (yet?) compatible with PX4.
Why do you arm if you don’t want to spin the props? You can always use a kill switch if you prefer direct throttle control.
If you disable the GPS check circuit breaker under Circuit breakers you won’t be able to arm without GPS.
That’s available. Configure the tuning channel in the tuning view and then select any param in the param editor and map it to one of your three tuning channels. This setting is not persistent across power cycles for safety reasons.
Hi Lorenze
Thanks for the tips !! If I can run the PID tuning from 2 knobs on TX that will be great !! I will try and hopefully get to fly again this weekend. I’ve been wanting to give a 2 thumbs up for the great work on the board on RC Groups, but I am “unconfirmed” there and they’ve not gotten back to me. All the hardware and connectivity is first class !!!
I do custom fiberglass work and the Pixracer and PDB are an awesome fit to my new experimental 400mm. it is a bit unstable as to landing gear and has the possibility of tipping over, so having the props spinning is not desirable. Prop spinning as a sign of arming is a fairly new program. I guess I am “Old School” if i want to see if the copter is armed I can give it a little throttle and it will let me know. Don’t want a arming or kill switch !!! I really like to see a LED for arming like Pixhawk.
Thanks !! Karl
“That’s available. Configure the tuning channel in the tuning view and then select any param in the param editor and map it to one of your three tuning channels. This setting is not persistent across power cycles for safety reasons.”
I think you are going to have to hold my hand on this. I see Tuning tab and Parameters, Parameter Editor, but I am not sure how I can a assign a channel to control tuning ?? Advanced settings ??
Thanks !!
Flew my QAV250 in Acro mode with Fatshark goggles and minimOSD using the new generic_250_racer parameters. Since this was the first time I’ve tried that non-LOS, the fact that I was able to fly for more than a minute in gusty winds says it’s behaving very well in Acro mode. The log also shows good rate tracking and orientation lock is solid when the right stick is centered. My QAV250 is also FMU-V2 + PX4IO, so this also shows that latency is not a significant issue with the IO coprocessor in the loop.
It happened just once, but when I crashed my drone (from small hight), sd card fall out somehow. I have Robocat 270 and Pixracer is protected from direct hits. You may want to put some type around it.