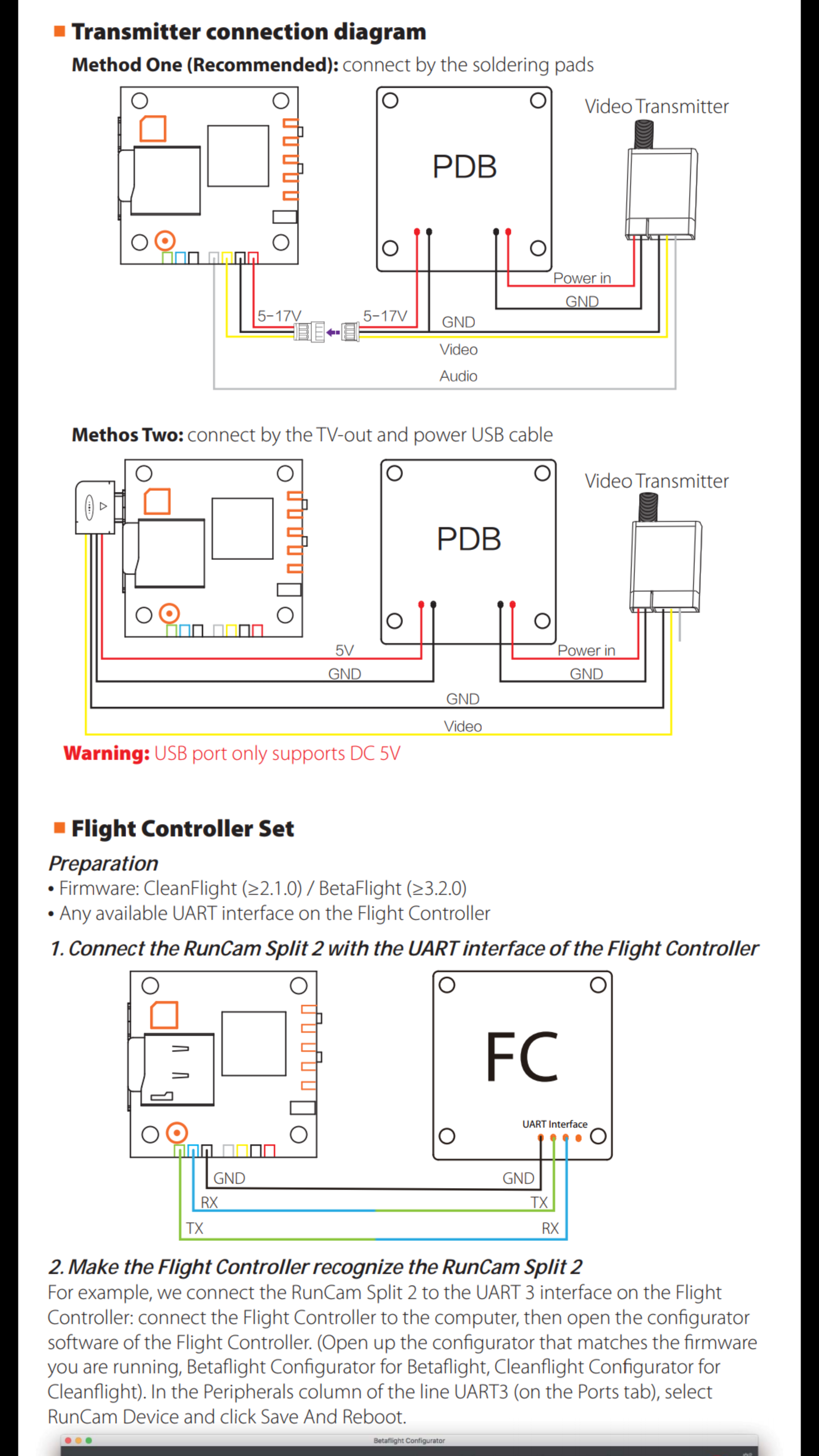
Hi everybody - I decided to post here as I’m experiencing a problem. I happen to own a runcam split2 and I would like to hook it up to a pixhawk controller which I do not have but I’ll probably get one. The split2 is possible to be controlled over eg. taranis qx7 transmitter. If wired correctly it is possible to remotely switch between camera modes, start/stop recording and toggle through the menu. In controllers such as F4 there is a UART interface where I can connect TX, RX, Ground from the camera module. Then I can set up runcam in the config. In pixhawk there are two inserts - telemetry and serial which seem to be able to cope with this sort of signal. However, I do not know how could I get the PX recognize the signal and control camera function. Any help will be greatly appreciated. Here is a scrsht of a split2 manual
Hi!
In order to control the camera via UART, not only do you have to find a UART to connect it to (that shouldn’t be a problem, I doubt, that you’ll use up all available UARTs - see https://pixhawk.org/users/wiring#serial_ports), but also the flight controller has to know how to “talk” to the camera. That is, the protocol for interfacing with the camera and the corresponding logic must be implemented in the flight controller firmware. As far as I know, PX4 does not implement it.
I know, that runcam cameras also allow controlling them in a limited fashion via PWM (see https://support.runcam.com/hc/en-us/articles/115010502648-How-to-use-remote-cable-on-Split-1-2-). You may connect the camera directly to some PWM output of your RC receiver if it has PWM outputs. Or, you can connect it to MAIN5 / MAIN6 (see https://dev.px4.io/en/airframes/airframe_reference.html#quadrotor-x) of the flight controller and feed one of your RC channels to one of those outputs.
That way you can start / stop recording and take photos using your RC transmitter.
Thank you for your prompt answer. That clarifies a lot.