Hello !
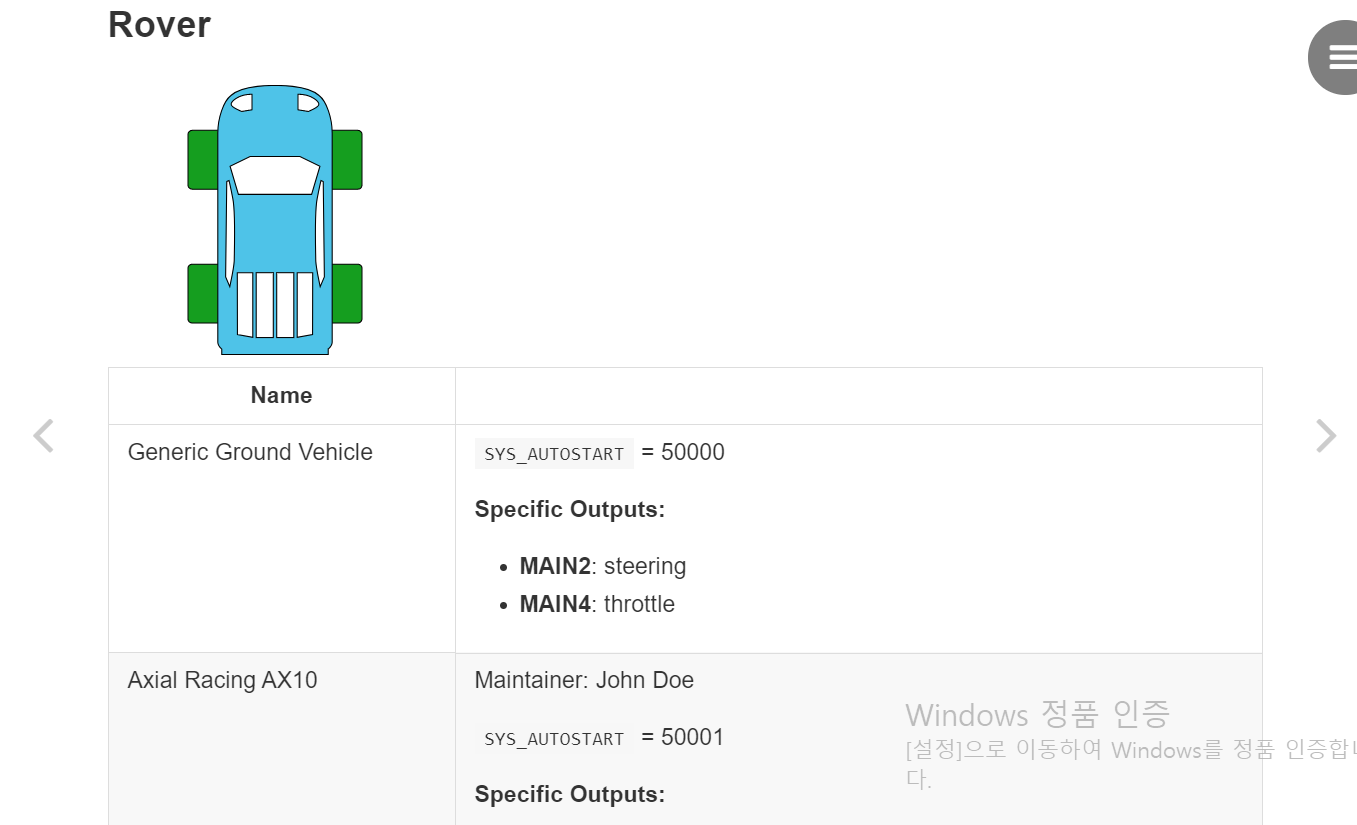
I will make Rover with px4 !
Mission planner have Throttle right and Throttle left menu
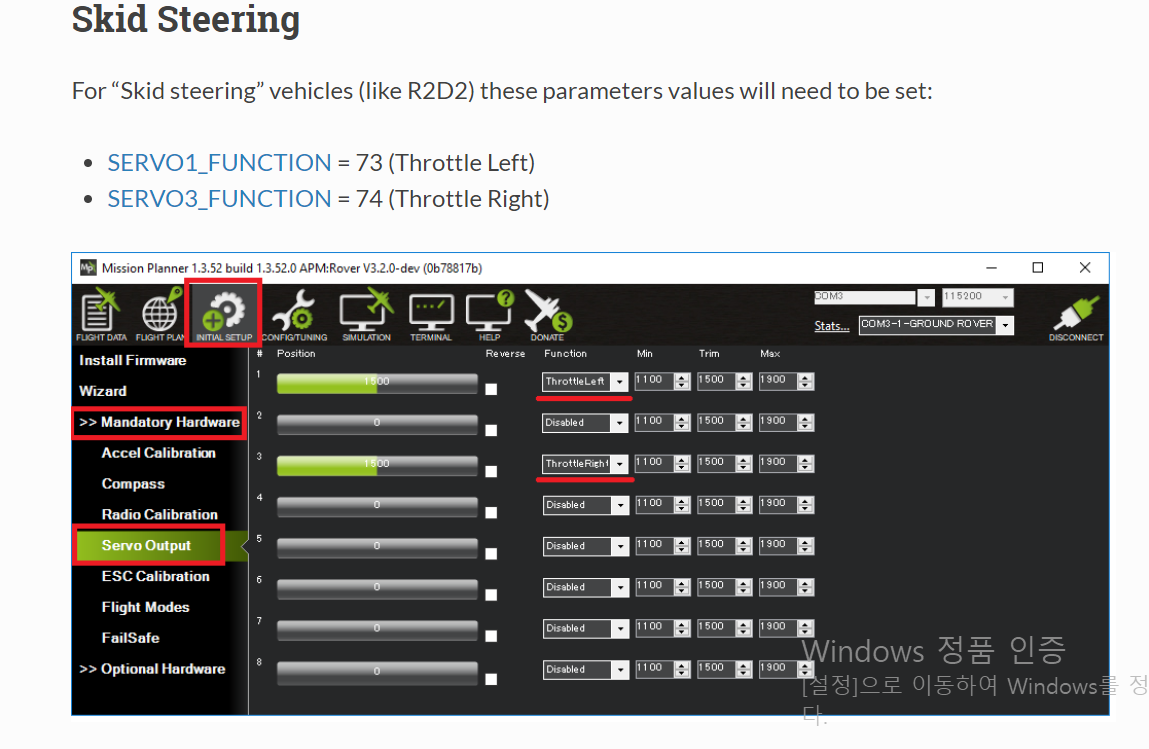
but QGroundControl don’t have Throttle right and Throttle left menu
How to set up Throttle?
Hello !
I will make Rover with px4 !
Mission planner have Throttle right and Throttle left menu
but QGroundControl don’t have Throttle right and Throttle left menu
How to set up Throttle?
First: You seem to be mixing things from two firmwares.
Second: QGC does not have support for setting up Skid Steering like Mission Planner does with ArduPilot. Although they are just parameters so you can use the parameter editor to do it manually.
Thanks your reply
but How to use that parameter editor?
Should I use qtcreator?