Hello,
The PX4 platform has been used indoors with mocap for a long time now, but the setup is still difficult and expensive for new researchers and developers, especially those who might have less experience with robotics (i.e. machine learning/ reinforcement researchers). I have visited multiples labs that took more than a year to build their lab and fly indoors with Mocap. My colleagues and I had a good experience working with developers both on the hardware and software side, so we decided to take on the challenge of making an excellent platform for researchers and developers.
Here is the platform with a video!

And here is an overview of the software installed:
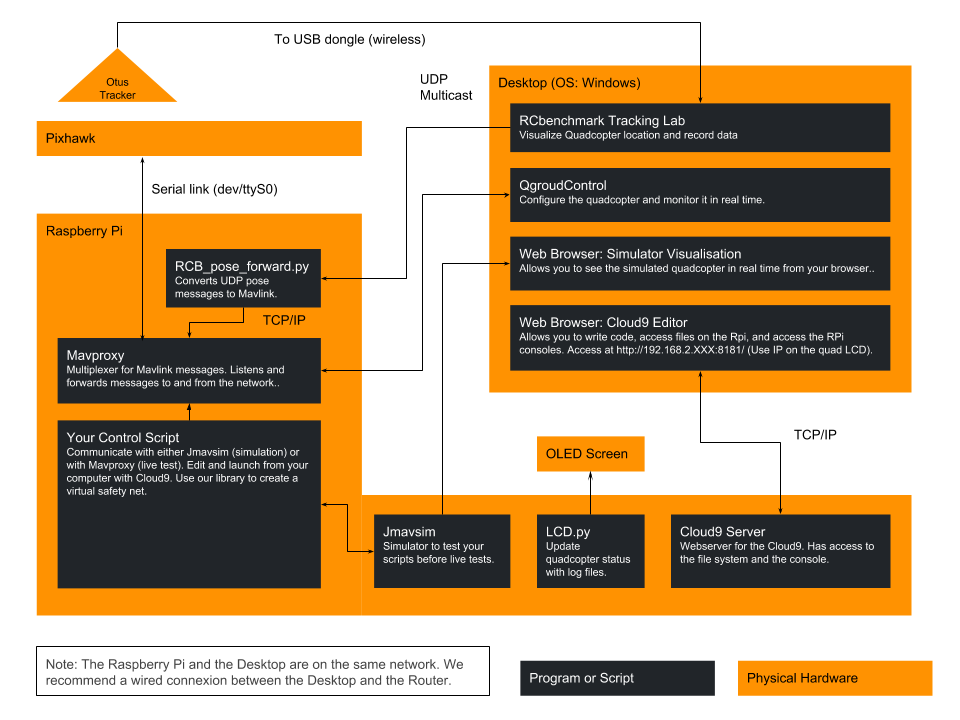
Some highlights:
- Otus tracker for position feedback (250 Hz, mm resolution, low noise, <1 cm accuracy over the whole 5 m x 5 m x 5 m tracking space)
- Full mechanical parameters identification
- Virtual safety net (for position, attitude and velocities)
- Control rates, attitude, position or velocity from a script with full access to the drone state using the Dronecode API.
- Ready to fly and code out of the box, or build your own.
- An in-browser editor so you don’t need to install any toolchain on your computer. You can code, run console commands and access the files system of the onboard computer from your browser!
- Jmavsim running on the Raspberry Pi (still testing this one) so you can test your scripts in a simulation.
- OLED screen displaying status (IP address, mocap status…). We found that it makes developing much easier.
As you can see above, we tried to reduce as much as possible the complexity of setting up the system. We will be offering full installation and training services, but I also want to make sure that the system is open so it can be modified and used as a platform for further development. We want to contribute to the Dronecode software so it is more friendly for indoor flight. We already submitted a patch to allow rate control.
The entire platform is documented here. The SD card files will be available soon. We are now working on documentation, final testing and shipping the first units.
Have you seen people struggle (and repeat other peoples work) when researching and developing UAVs? I can also definetly answer questions related to indoor flight with the PX4!
Thanks!