Ausgesprochen unwahrscheinlich. Wenn Du Arducopter draufspielst, kannst Du das ja sehr leicht kontrollieren. http://www.rcgroups.com/forums/showthread.php?t=2507962
Wie man das PX4 sieht, weiß ich (noch) nicht.Geht aber bestimmt auch.
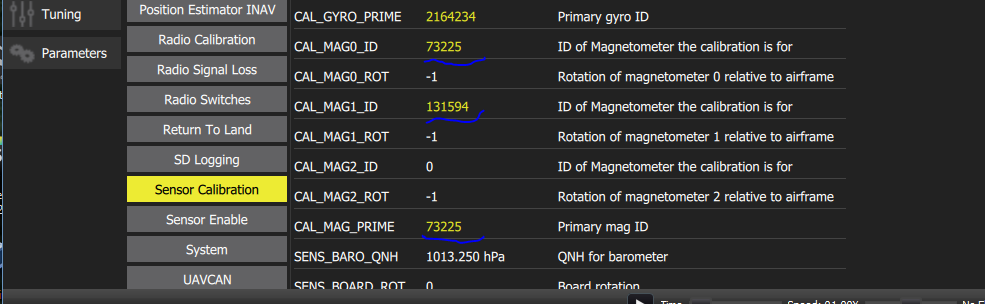
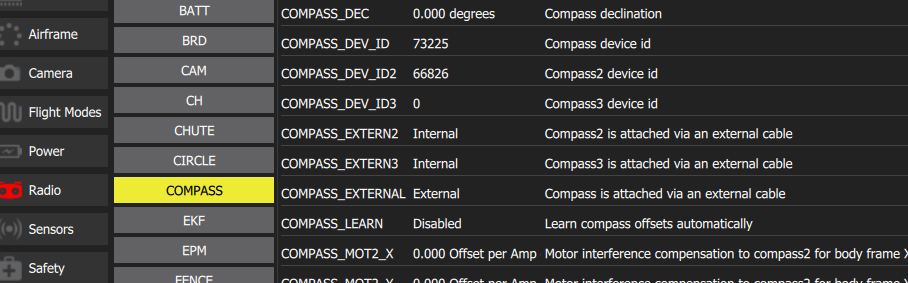
habe ich einfach mal die IDs für den internen und externen Kompass eingetragen
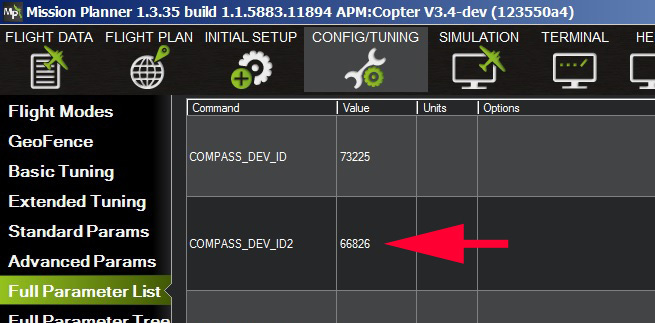
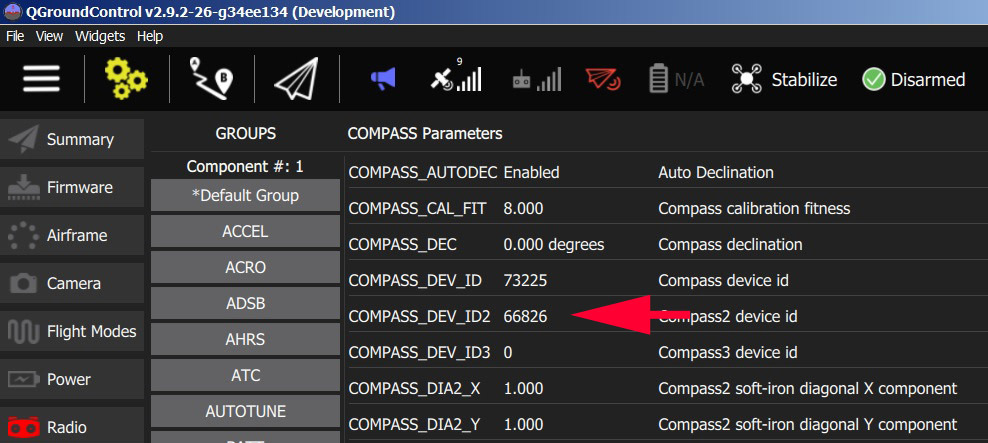
Lade mal mit der tagesaktuellen QGC Version (daily build) den aktuellen AC Master runter, dann werden die ID falls korrekt bzw. intakt, automatisch eingetragen. Händisches Eintragen hilft nicht.
Die zweite ID zeigt die des HMC5983 des Pixracers.
Siehst Du diese nach oben verschoben, und keine zweite ID,so ist Dein externer MAG platt, falsch angeschlossen, was auch immer. So war das mit der AC Diagnose gemeint.
So, habe den Fehler mit Arducopter gefunden… es war die SD-Karte. Neu formatiert und schon startet er wieder.
ArduCopter ist mir doch sehr viel vertrauter, ich bleibe erst mal dabei!
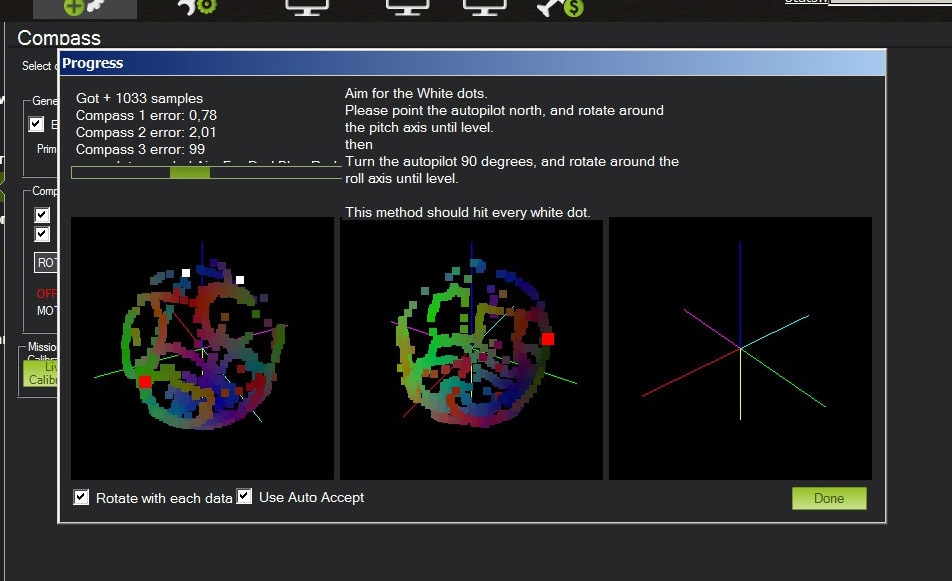
Also habe ich in Mission Planner eine Kompass Kalibrierung gemacht.
FrSky Telemetrie funktioniert übrigens mit Arducopter, wenn man im MissionPlanner für serial4 9600 Baud (SERIAL4_BAUD = 9) einstellt und das Protokoll auf FrSky umstellt (SERIAL4_PROTOCOL =3 oder 4, je nachdem welcher Empfanger dran hängt).
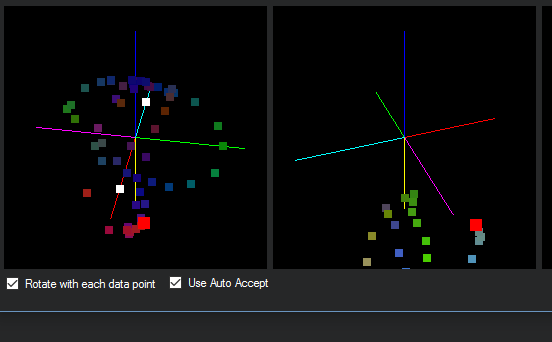
Da sieht man nur (bei Abweichung der Drehrichtung), dass der externe verdreht eingebaut ist, bzw. am “Füllungsverhalten” abweichende Offsets. . Ein defekter MAG zeigt gar keine Punkte oder nur zwei, drei und error 99 (s.u.) Dass sich die Kugeln bzw. deren Füllungsverhalten bei (naturgemäß) abweichenden Offsets unterscheiden, ist ebenso klar. Schaltest Du Auto Accept ab, kannst Du beide vollständig füllen.
Du hast schon recht, ganz kaputt ist er nicht.
Die Offsets liegen aber in aberwitzigen Bereichen (kannst Du auch schön auf dem obersten der 4 Bilder sehen) und sind jedesmal komplett anders.
.
Der externe Kompass zeigt korrekte Werte an (kann man schön auf der Kartendarstellung sehen, ich möchte aber dieses Forum nicht mit noch mehr von meinen Bildern fluten Mit einem Kompass komme ich super klar, Telemetrie funktioniert, dafür muss der Kleine nicht zurück gehen!
Nochmal vielen Dank für Deine Anteilnahme!
Vielleicht kann ich mich ja irgendwann mal revanchieren!
Das Problem mit dem Kompass ist dass er nicht genug Range im Normalbetrieb hat um Norden in alle Richtungen noch zu messen. D.h. der interne Kompass wird über eine ganze Spanne den gleichen Winkel anzeigen, obwohl der Quad sich dreht.
Warum dann nicht einfach nur den externen Kompass benutzen? Weil der starke Offset des internen ein Symptom von grösseren Problemen auf dem Board sein kann. Es kann sein dass die Stromversorgung der Sensoren nicht stimmt. Dass es einen Kurzschluss gibt der zu starkem Stromfluss und dem Offset führt - oder dergleichen.
Ich würde den Quad nicht mehr mit gutem Gefühl vor mir schweben lassen - und deswegen kann man in PX4 auch keine nicht-funktionierenden Teile abschalten. Ein Autopilot ist Avionik und diese kann per Definition zu abstürzenden Drohnen führen - wenn sie nicht mehr ganz voll funktionsfähig ist sollte sie gewartet oder ausgetauscht werden.
Ich hatte den Eindruck, dass das Modul nicht ganz perfekt verlötet war und da das Rücksenden eh nicht ganz trivial ist, habe ich mal mit etwas Heißluft nachgeholfen…
Siehe da, beide Kompass-Module sind jetzt synchron. Erste Testflüge mit dem PX4-Stack sahen schon mal ganz gut aus, werde das mal im Auge behalten und weiter testen, vielleicht war es das ja tatsächlich.
Wenn der abstürzt ist das nicht ganz so wild, es ist ja eh nur ein kleiner selbst gedruckter Testkopter um das Potential des Pixracers auszuloten.


 Mit einem Kompass komme ich super klar, Telemetrie funktioniert, dafür muss der Kleine nicht zurück gehen!
Mit einem Kompass komme ich super klar, Telemetrie funktioniert, dafür muss der Kleine nicht zurück gehen!