Hey all,
I am testing an octacopter to improve its stability and analyze its general behavior.
I have been facing issues with the navigation where it loses navigation mid flight and kicks into failsafe mode and comes to land but continuously drifts away while landing.
I recently did two flight tests. I calibrated the sensors before both flights just to make sure the issue wasnt related to sensor calibration. The flight mission were to just take off to a location very close to home position and the landing was done through the land command from QGroundControl.
I am attaching the PX4 review links of the two flight logs.
Log 1
Log 2
Can someone take a look at the logs?
Has anyone faced similar issues? Any solutions/Suggestions?
Let me know if you need any more info.
Thanks in advance
It seems like the autopilot is subject to massive vibrations. Have you balanced the props and are there any other moving parts that could cause this. If you enable high speed logging we can analyze the frequency spectrum which would help figuring out the problem. Can you enable it using SDLOG_MODE parameter?
Hi,
Thanks for the suggestions.
We haven’t balanced the props and there are no other moving parts on the drone. We have enabled the high speed logging and uploaded a new set of flight data here.
For this flight we just gave it a mission to hover at 20m. It was a bit unstable from the get go but it got to the desired altitude. The navigation failure occurred even before we gave it a land command.
We will do the prop balancing next time and check again.
Do take a look at the log and see if you can get any more helpful info from it.
Thank you again.
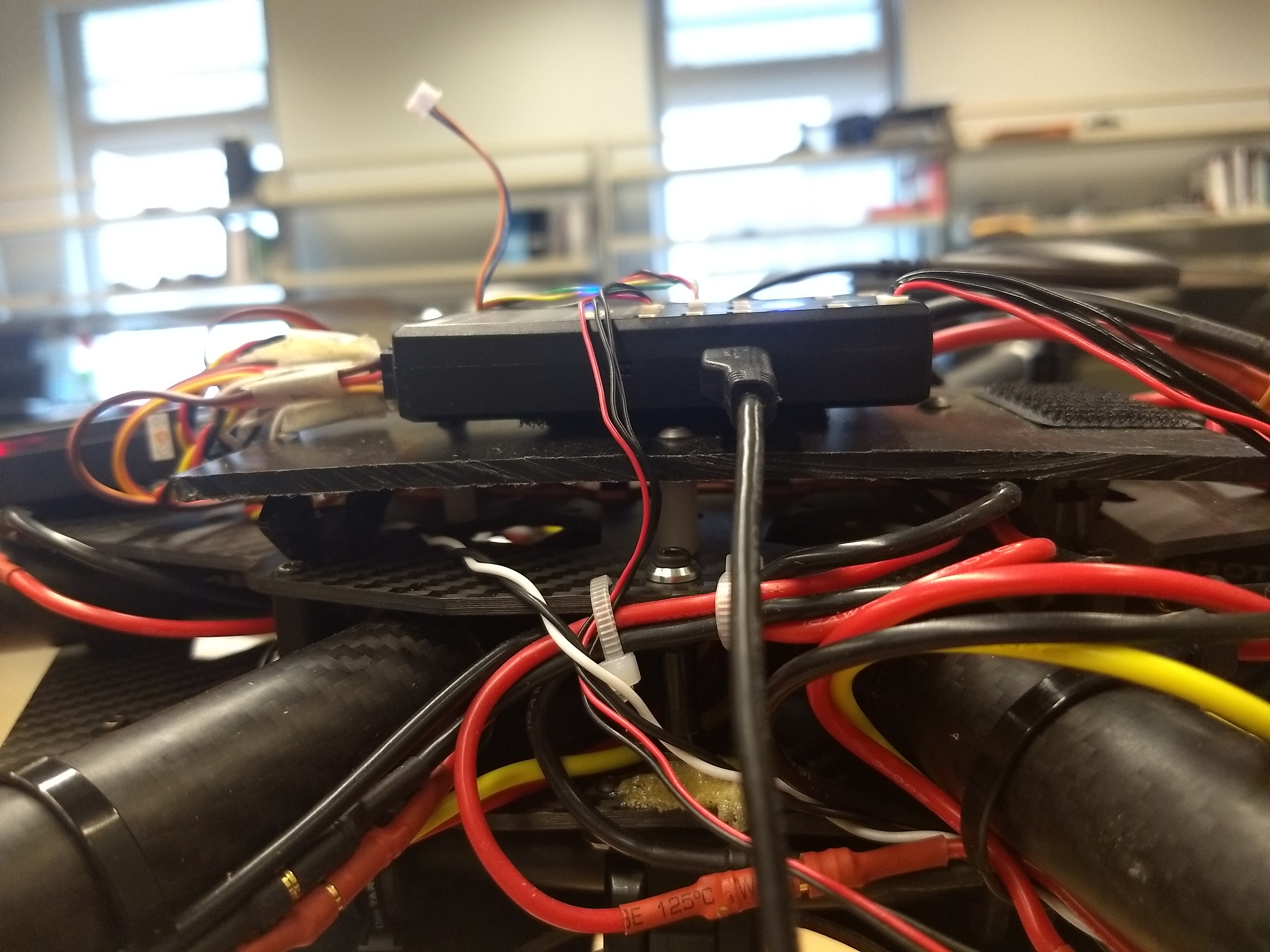
The pixhawk is mounted on the frame using velcro tape. Pic below.