Hi everybody!
I trying to implement the typical configuration Optitrack+Companion PC (Raspy pi3-Ubuntu 16.04+ROS).
I followed step-by-step this beautiful guide: https://dev.px4.io/en/ros/external_position_estimation.html.
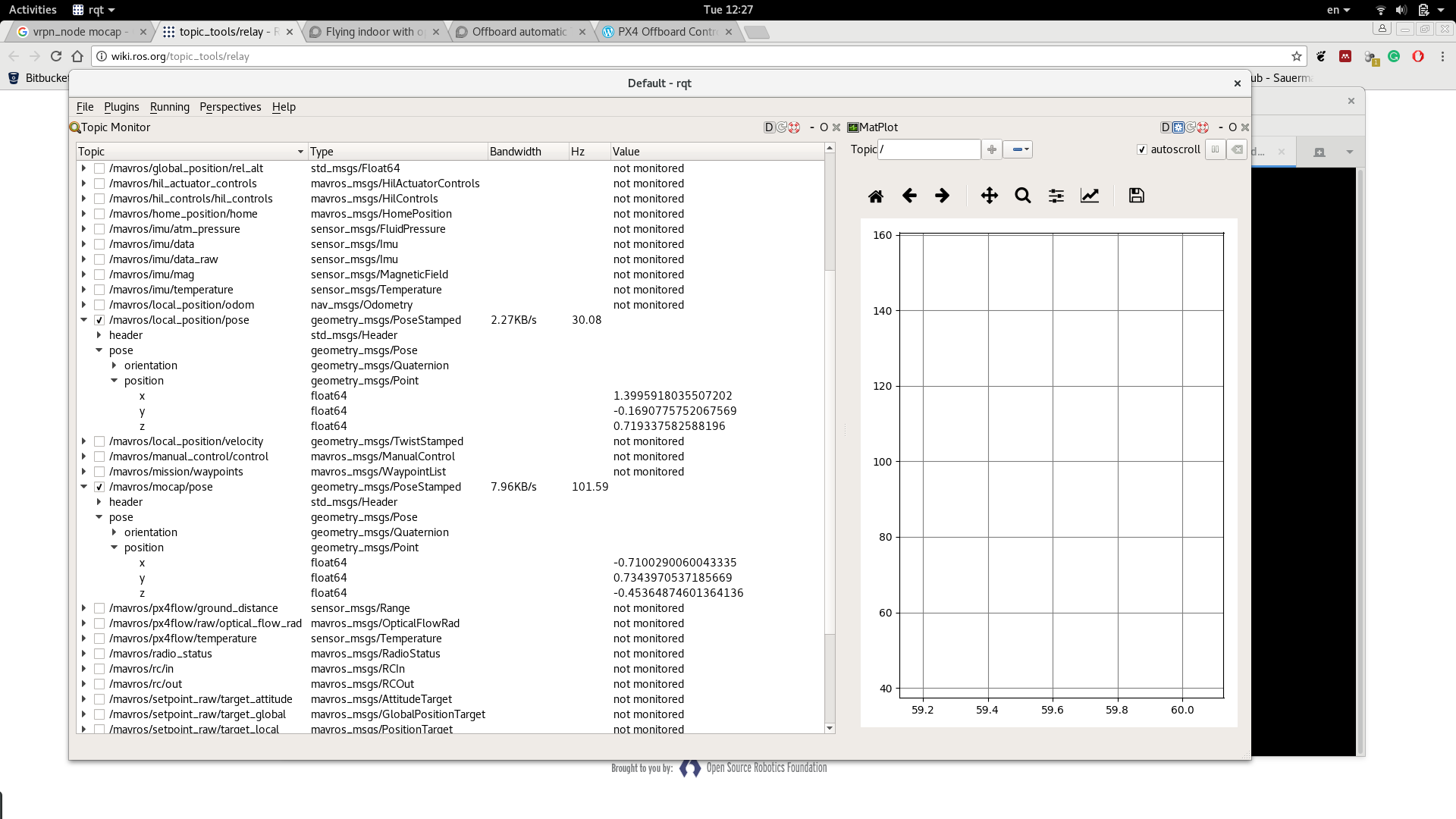
The problem is that the /mavros/local_position/pose and /mavros/mocap/pose topics are different and the px4.launch node returns, continuosly, this error:
[ INFO] [1501159465.907498283]: FCU: [lpe] mocap position init: 0.13, -0.07, -0.03 m
[ INFO] [1501159465.955114116]: FCU: [lpe] mocap timeout
[ INFO] [1501159466.555640158]: FCU: [lpe] mocap position init: 0.13, -0.07, -0.03 m
[ INFO] [1501159466.605336095]: FCU: [lpe] mocap timeout
[ INFO] [1501159467.206143543]: FCU: [lpe] mocap position init: 0.13, -0.07, -0.03 m
[ INFO] [1501159467.257601408]: FCU: [lpe] mocap timeout
[ INFO] [1501159467.806573178]: FCU: [lpe] mocap position init: 0.13, -0.07, -0.03 m
[ INFO] [1501159467.857350001]: FCU: [lpe] mocap timeout
[ INFO] [1501159468.457448126]: FCU: [lpe] mocap position init: 0.13, -0.07, -0.03 m
[ INFO] [1501159468.506785574]: FCU: [lpe] mocap timeout
[ INFO] [1501159469.157549532]: FCU: [lpe] mocap position init: 0.13, -0.07, -0.03 m
[ INFO] [1501159469.204930365]: FCU: [lpe] mocap timeout
[ INFO] [1501159469.478843490]: HP: requesting home position
[ INFO] [1501159469.757964063]: FCU: [lpe] mocap position init: 0.13, -0.07, -0.03 m
[ INFO] [1501159469.805681771]: FCU: [lpe] mocap timeout
[ INFO] [1501159470.406720365]: FCU: [lpe] mocap position init: 0.13, -0.07, -0.03 m
[ INFO] [1501159470.457914531]: FCU: [lpe] mocap timeout
[ INFO] [1501159471.006532969]: FCU: [lpe] mocap position init: 0.13, -0.07, -0.03 m
The px4fmu-v2_lpe firmware version is v1.6.0-rc4
Any suggestions?
Thanks,
Fabrizio