Hi,
I am using PX4 firmware on Pixhawk, position estimation is based on EKF2 with optical flow and GPS.
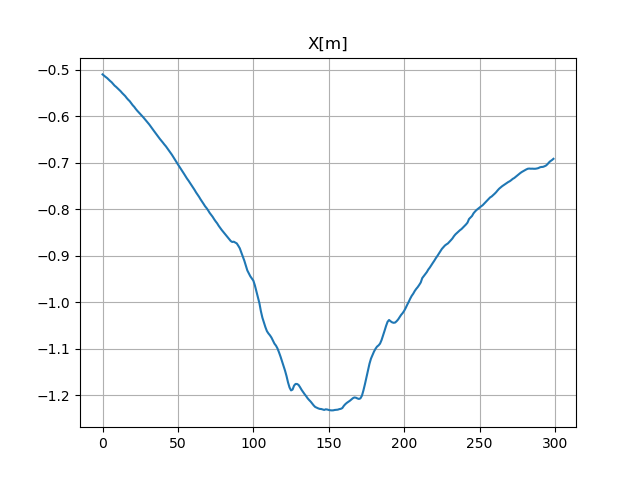
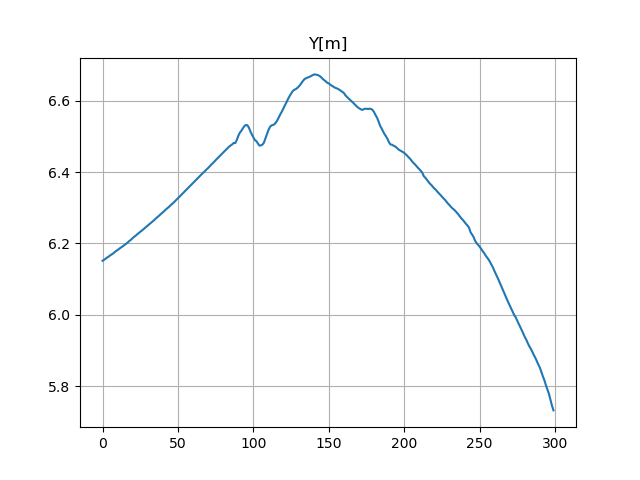
I wonder how is it possible that the the readings from local position are very noisy, drifting 1.5m in XY, while the drone keeps the position very well in the air.
How does that happen? how is it possible that the drone is able to keep his position while the input is that noisy?
Screenshot of the XY drift -