I followed the Writing an Application tutorial here
Redirecting... Page moved
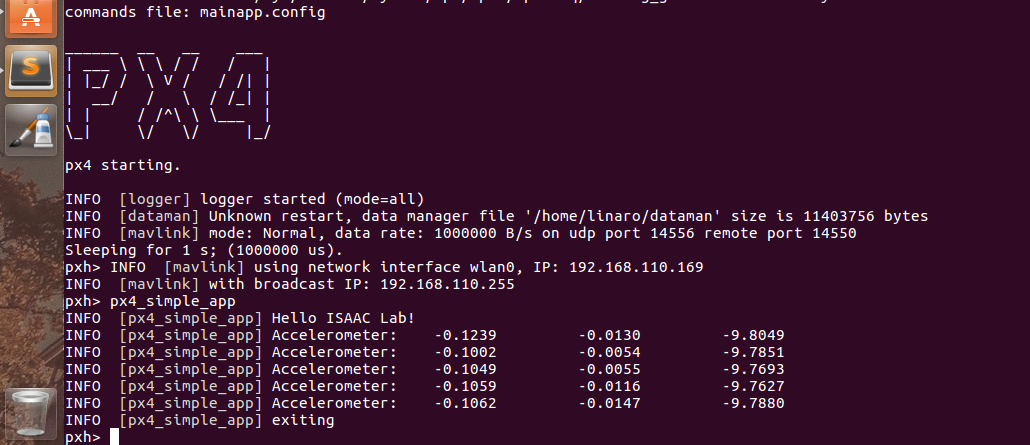
I was able to flood the "[px4_simple_app] Accelerometer: … " on the console
I understand that the code is to copy the accelerometer data, then directly paste it to the attitude parameters without any filters.
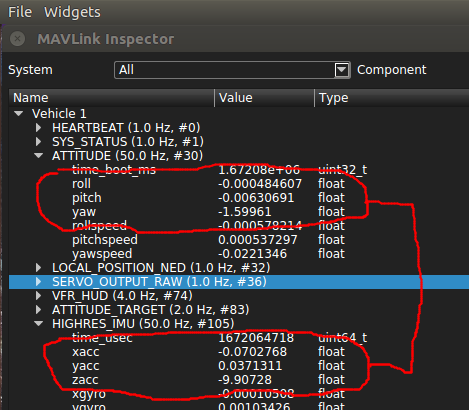
However, when I connected my SnapDragon board with QGroundControl, and look at those data, they weren’t the same.
(Attitude: roll pitch yaw and Accelerometer: xacc yacc zacc were not the same as shown in the attached figure)
Does anyone know how to solve this issue?
Thank you