Hi,
I have a two-axis servo gimbal working with the integrated gimbal controller connected to AUX1 and AUX2. I am now trying to get a separate servo (AUX5) working either with manual RC control or ideally via MAVlink messages.
extras.txt:
vmount start
mount.aux.mix:
# roll
M: 1
O: 20000 20000 0 -20000 20000
S: 2 0 20000 20000 0 -20000 20000
# pitch
M: 1
O: 25000 25000 0 -20000 20000
S: 2 1 25000 25000 0 -20000 20000
# yaw
M: 1
O: 25000 25000 0 -20000 20000
S: 2 2 25000 25000 0 -20000 20000
Parameters:
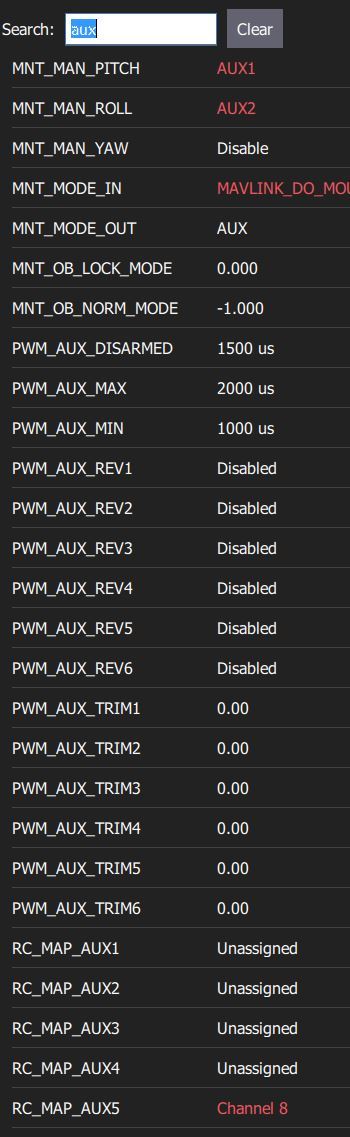
Inputs on channel 8 have no effect on the servo at all.
Within the nsh shell the pwm test command moves the servo as expected.
pwm test -c 5 -d /dev/pwm_output1 -p 1100
Does anyone have an idea of what is going wrong here? It’s a Pixhawk with 1.6.1