We have experienced fly aways on a couple different occasions.
The first time we believed it was because of a power issue causing our on board computer to die.
However, this time we remained connected to our on board computer as the drone flew away. Here is the flight log. https://logs.px4.io/plot_app?log=bda48628-bc6f-4cbc-b203-0d0e7de6f560
I noticed on both flights we experienced the Gps fusion timeout. This makes sense as it acted as if it was trying to get to a different location that it was never at. I found some forums online and someone recommended this script PX4-Autopilot/process_logdata_ekf.py at main · PX4/PX4-Autopilot · GitHub
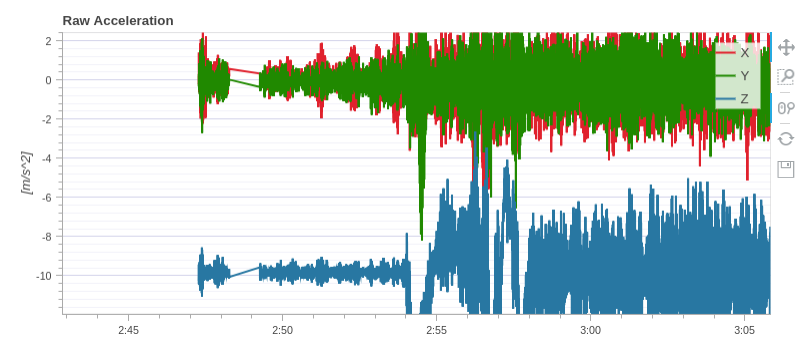
The vibration gets so bad that it is unflying, but I’m not sure if this happens right before or after we lose gps fusion sensors. Can anyone help with this or guide me in the right direction to fix this problem? It is very troubling that we cannot reproduce this and it only happens about once in every 50 flights.
I have experienced similar things happen and found these glitches in my sensor data too.
In my case, my drone take off and then tilted into a certain direction and keep moving then crash into ground.
I don’t exactly know what caused this but I assume it may have been from low temperature because it only happen to me when I was flying in winter.
How was the weather when you fly the drone?
So I am pretty sure we have figured out the issue. If you notice the heading is thrown off by 180 degrees. There is a Maytek 5V/4A or 12V/4A BEC we were using to power our single board computer. If you put a magnetic compass on a unpowered BEC it inverts 180 degrees. So we changed it to a BEC with no noise and the problem has disappeared so we assume the EMI coming off that BEC is causing the problem. Will update you all when we test more tomorrow, weather permitting.