Hello,
I did as the multi_vehicle simulation:
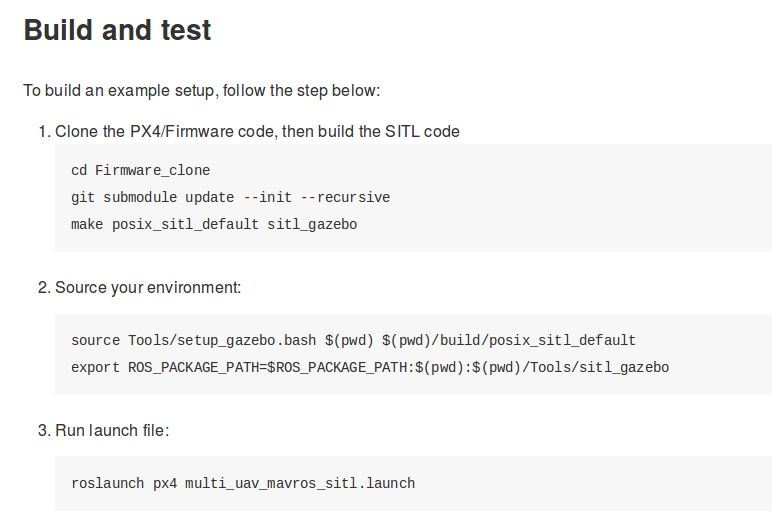
and I can launch the gazebo with 2 uav like this:
But I cannot communicate with them. And these are errors I found in console:
node name: sitl_2
data path: /home/shk/src/Firmware
commands file: /home/shk/src/Firmware/posix-configs/SITL/init/ekf2/iris_2
ERROR [Unknown] Error creating symlink /home/shk/src/Firmware/ROMFS → /home/shk/.ros/ROMFS
Restoring terminal
failed to start local process: /home/shk/src/Firmware/build/posix_sitl_default/px4 /home/shk/src/Firmware /home/shk/src/Firmware/posix-configs/SITL/init/ekf2/iris_2 __name:=sitl_2 __log:=/home/shk/.ros/log/06f35bf8-1ddc-11e8-b355-0016eb5a019a/uav2-sitl_2-7.log
local launch of px4/px4 failed
process[uav2/iris_2_spawn-8]: started with pid [9417]
[ INFO] [1519969149.795848471]: Plugin fake_gps initialized
[ INFO] [1519969149.796313894]: Plugin ftp loaded
process[uav2/mavros-9]: started with pid [9426]
Please help me if you know how to solve this issue. Thanks!!