Pixhawk 2
PX4 FW V. 1.7.3
Hexacopter X Config
S900 Frame w/ heavy payload (22ah battery and ~2.5kg / 5lb payload)
Below is data on two missions, one right after the other; first mission was successful, second was a takeoff rollover.
Both missions were under moderate wind (22mph solid, 29moh gusts), which is normal and we have plenty of fine takeoffs in this condition.
So far, we have clamped the PWM_MIN to 1200us from the default of 1075 to try and prevent the motors spinning down to far in this potential edge case.
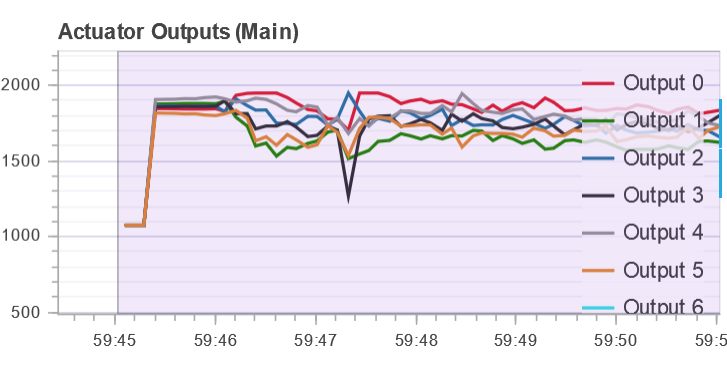
Good Mission:
The first takeoff was great, mission success. In main outputs graph, all motors are above 1500us, even under correction. Setpoint seems to start updating 1 - 1.5 seconds after takeoff.
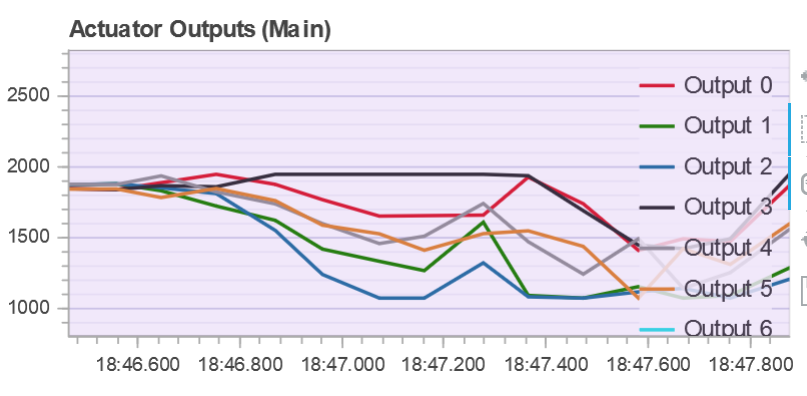
Bad Mission:
Motor output dip below 1500us and even close to completely off (1000us), seemingly to correct itself.
The hex flipped to the right almost immediately after spinup and mission launch command.
The setpoints don’t seem to update like they did in the first mission.
Good Flight

Bad Flight