Hi,
I am trying to use DronecodeSDK on Raspberry Pi. I removed GPS, I am using Distance Range Finder and Px4Flow sensor. But my vehicle can not arm. Always getting “Vehicle is getting ready to arm” message.
Hi,
I am trying to use DronecodeSDK on Raspberry Pi. I removed GPS, I am using Distance Range Finder and Px4Flow sensor. But my vehicle can not arm. Always getting “Vehicle is getting ready to arm” message.
Hi, I suggest you look at the code of why it is printing “Vehicle is getting ready to arm”.
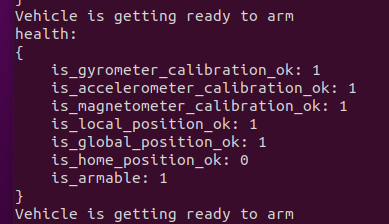
You will see that it calls: telemetry->health_all_ok(). To get more info you can do something like:
std::cout << telemetry->health() << std::endl;
Hmm, I should have tought. It gives this output. I want to use drone at indoor. I removed GPS. Can I discard local,global and home position?

Alright, using flow instead of GPS is not tested yet, so I’m not sure how to help here right now.
Maybe someone else has already done it?
Otherwise I can try to follow up at some point in the future.
I added GPS, home_position_ok couldn’t switch to true.
So you’re saying local and global position are ok but home position is not?
yes, home position is not ok
That is very odd, because usually you get a home position as soon as you have a global position with PX4. Is the PX4 firmware changed in any way?
Could you paste the SITL output?
Hi @JulianOes, @saucompeng I have encountered the same error and I cannot manage to fix it. I am running the ‘iris_opt_flow’ model in SITL and, when trying the MAVSDK takeoff and land example script it gets stuck in ‘vehicle is getting ready to arm’ message, just like described in this post. I have included this line in the script to print the health status:
std::cout << telemetry.health() << std::endl;
An this is what I am getting:
The home position appears not to be ok, again, just like it is described in this post.
Did you mange to solve this issue? If so, could you help me?
Thank you!
Thanks for helping with this problem. I also have the same situation.