I am flying drone indoor with px4flow for position hold using ekf2.
It looks like it is trying to maintain position in x,y axis as below.
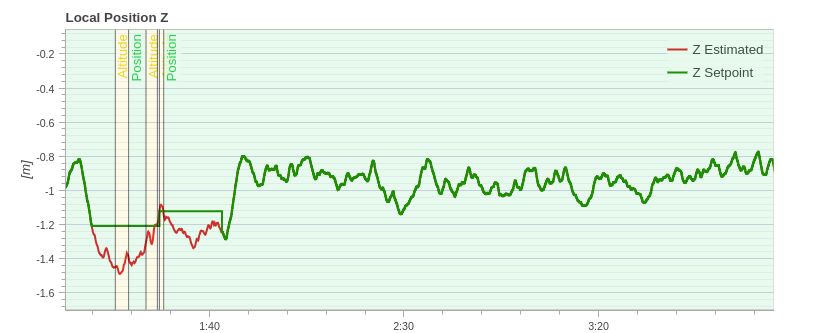
However when looking at z axis, setpoint is moving as if it is following the control output.
During this flight, I was trying to maintain throttle at about 50% and only engage if it loose too much altitude.
I am curious if this behavior is normal and only because it is flying too close to floor. (I did not enabled terrain following mode nor distance sensor aid mode)
In mc_pos_control module, I see some code is limiting the height and manipulate z setpoint.
Does anyone have similar experience?
1 Like
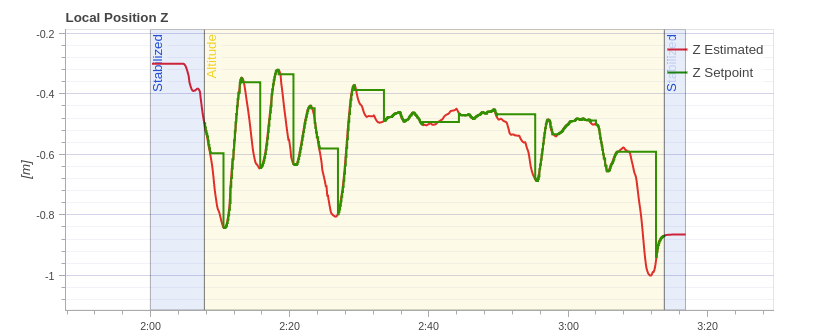
Below plot shows pos z setpoint is constantly resetting in altitude hold mode whenever I put throttle in the middle.
Looks like something is trying to reset the alt hold status which I can’t find.
Anybody have experienced this kind of problem?
1 Like
We have also seen such behaviour in our Quadcopter. Any updates on this?
@Kyuhyong_You It looks like your vehicle is unable to track the altitude setpoint and when it drops altitude, you are intervening with the throttle stick.
It could be that your hover throttle value is too low
Hi,
I have an issue when being in position mode.
My X and Y position setpoints are jumping from time to time, do you know why?
https://review.px4.io/plot_app?log=7bbb32d2-cd09-42ac-be74-cf78531afc2d
Thanks.